Biomedical Engineering Reference
In-Depth Information
Force
Sensor
Force
Controller
Position
Controller
Slave
Master
Position
Sensor
+
Position
Sensor
Environment
Operator
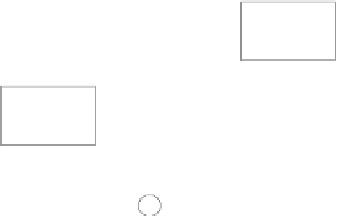
Figure 1.13
Force Relection Control System for Tele-operation, the
motion of the operator in the master side is reproduced in the
environment by the slave robot. The force produced during the
interaction between the slave and the environment is relected
to the operator in the master side in an open loop. The relected
force is highly dependent to the intrinsic characteristics of the
master device.
Position
Controller
Position
Controller
Slave
Master
Position
Sensor
+
Position
Sensor
Operator
Environment
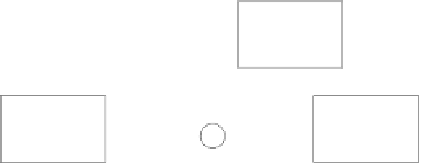
Figure 1.14
Symmetric Position Control System for Tele-operation, this
system enables to reproduce in the master side the applied
force in the slave side.
The irst transatlantic telesurgery was achieved in 2001, where
a cholecystectomy was achieved while the surgeon was in New York
and the patient in Strasbourg [50], while the 7 DOF master-slave
robotic system for minimally invasive surgery DaVinci was presented
in 2000 [51] and is actually used in more 1450 hospitals around the
world, and its applications extend to a large number of treatments in
cardiology, urology, gynecology, colorectal and general surgery.









































































































Search WWH ::

Custom Search