Biomedical Engineering Reference
In-Depth Information
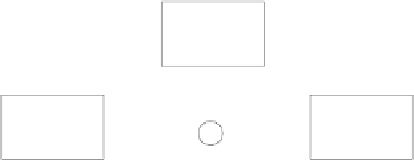
systems not only reproduce the motion desired by the operator, but
additionally they relect to the operator the force produced by the
interaction of the slave robot with the manipulated tissue (Fig. 1.12).
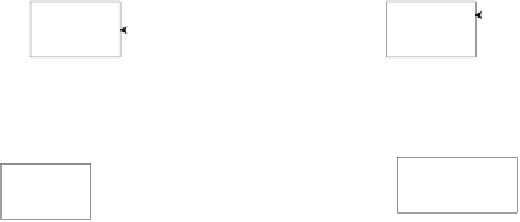
Other coniguration examples for telesurgery are given in Figs. 1.13
and 1.14. In these master-slave robotic systems, the master side
must also show to the surgeon the progress of the surgery. For that,
the slave side should manipulate the vision system capturing intra-
surgical or luoroscopic images. As the distance increases between
the master and the slave units, the time-delay of video, control and
audio signals becomes more important.
Position
Controller
Slave
Master
Position
Sensor
+
Position
Sensor
Operator
Environment
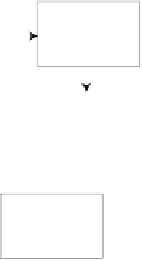
Figure 1.11
Unilateral Control System for Tele-operation, the motion of the
operator in the master side is reproduced in the environment
by the slave robot.
+
Force
Sensor
Force
Sensor
Force
Controller
Position
Controller
Slave
Master
Position
Sensor
+
Position
Sensor
Environment
Operator
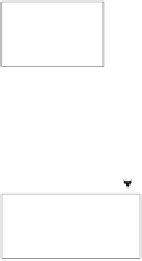
Figure 1.12
Bilateral Control System for Tele-operation, the motion of the
operator in the master side is reproduced in the environment
by the slave robot. The force produced during the interaction
between the slave and the environment is relected to the
operator in the master side.












































































































Search WWH ::

Custom Search