Biomedical Engineering Reference
In-Depth Information
that relied on a virtual catheter path using a three-dimensional
vessel centerline, reconstructed from two calibrated angiograms
[22]. However, it is still needed to increase the accuracy for IVUS
motion capture and registration.
a)
b)
Descending
Aorta
US Emmiter
6 DOF Magnetic Tracker
Millimetric Scale
Stent Graft
Aortic
Aneurysm
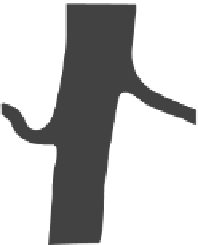
Figure 7.21
(a) Illustration of stent graft in the descending aorta.
Vasculature branches and stent graft holes (example pointed
with an arrow) must be aligned during the deployment for
the graft branches installation. (b) Hybrid probe integrating
intravascular ultrasounds with magnetic trackers.
To track the position of catheter tip inside blood vessel
models, some researchers installed encoders or accelerometers
on the catheter-driving mechanism as source of feedback [24-25].
However, such technology cannot provide precise feedback. Because
the catheter is lexible, its shape will be changed easily according
to the shape of blood vessel wall and the force exerted on it. For
that posture information will be obtained from a magnetic tracker
as proposed in [15-16]. In this section, we propose blood vessel 3D
imaging relying on the fusion of blood vessel imaging from IVUS and
of posture information from magnetic tracker.
7.5.1
Sensor Fusion of IVUS and Magnetic Tracker
An Intravascular Ultrasound Imaging Catheter Visions PV 8.2 (Volcano
Corporation, Rancho Cordova, CA, USA) connected to the VH
TM
IVUS
Imaging System were used. The ultrasound frequency is 10 MHz and
the detection range is less than 60 mm. NDI Aurora Electromagnetic











































































Search WWH ::

Custom Search