Biomedical Engineering Reference
In-Depth Information
5
Reference Point
5 mm Radius
Insertion
Extraction
4
4
30
5
Reference Point
5 mm Radius
Insertion
Extraction
400
300
20
3
2
200
3
2
10
100
1
1
0
0
20
40
60
80
20
40
60
80
100
120
Coronal Axis (mm)
Coronal Axis (mm)
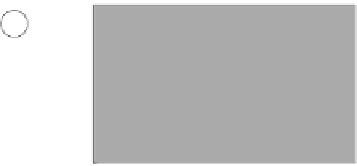
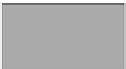
Figure 7.18
Magnetic sensor motion for a one-dimensional path
reconstruction with ACIS inside the membranous model of
carotid artery (left) and for ureter model, where insertion
speed changes are observed at points 3 and 4 (right) [15].
7.4.5
Two-Dimensional Path Reconstruction
It is required that when there is a bifurcation on the path, the system
is able to recognize the correct branch, if the insertion path is not
being reconstructed properly and go back to the last bifurcation if
it identiies that case. To verify those requirements, a trajectory was
designed inside an arterial silicone model of regions 2 and 3 (Fig.
7.19). The sparse LUT
M
1
only modiies the parameters
C
a
2
n
to change
the direction of the catheter motion and
C
a
3
n
for twisting the catheter.
As only two DOF of the LSM are changed by
M
1
to reconstruct the
designed path, this path is said to be two-dimensional even if the
trajectory is three-dimensional. As all reference points are separated
by more than 12 mm, the detection rang
d
n
was set to 6 mm for both
trajectories.
With the model placed near the LSM, the spatial coordinates of
each reference point were measured inserting the magnetic tracker
into the model. Each set was then associated to coniguration
C
a
of
the LSM, building that way each vector of
M
1
. The coniguration for
each vector was designed with the purpose to control the catheter
trajectory inside the silicone model. The computer interfaced the
magnetic tracker with the LSM in order to evaluate robot guidance
in a closed loop system. In this experiment, LSM moves the magnetic
tracker sensor placed on the catheter tip obtaining feedback from it in
order to reconstruct automatically a predeined catheter trajectory.
The magnetic tracker was placed inside the LSM and taken to the
entrance of the arterial model. From the software of the PC, the LSM
and magnetic tracker console were initialized. Then, the feedback




































































































































Search WWH ::

Custom Search