Biomedical Engineering Reference
In-Depth Information
of the robot to be controlled. The sparse LUT
M
is made of
m
vectors
with
m
ℕ
.
¨
¸
P
P
0
©
©
©
©
©
¹
¹
¹
¹
¹
1
M
(7.1)
P
m
ª
º
(
01
(7.2)
xn
,
p
yn
, and
p
zn
are the position coordinates of a reference point
measured with the magnetic tracker. In those points, the robot
should receive the commands deined by the variables
C
0
n
,
C
1
n
, ...,
C
kn
to reproduce a desired motion.
k
-
1 is the number of control
parameters that can be modiied in a robot to change its behavior.
Then a detection range,
d
n
, should be deined for each
P
n
. This
range must ensure that the reference point is detected.
X
t
mag
,
Y
t
mag
, and
Z
t
mag
are deined as the spatial coordinates given by the
magnetic tracker in a time
t
after the construction of the LUT. The
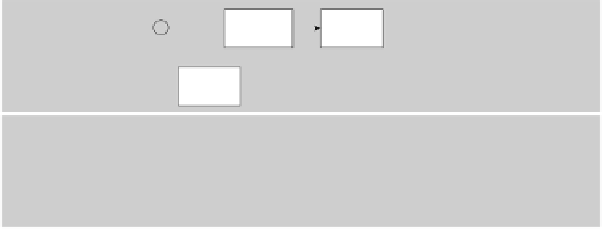
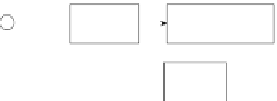
rule-based controller, shown in Fig. 7.1, compares
M
to the output of
the magnetic tracker.
PpppCC C
,
,
,
,
,...,
)
n
xn
yn
zn
n
n
kn
+
Robotic
Camera
Sparse
LUT
Rule Based
Controller
Video of Catheter
Insertion
Magnetic
Tracker
Catheter
Motion
Operator
a)
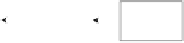
+
Catheter Insertion
Robot
Sparse
LUT
Rule Based
Controller
Catheter Motion
Magnetic
Tracker
b)
Figure
7.
1
Diagrams for robot control based on magnetic trackers and
sparse look up table for (a) robotic camera system and (b)
catheter insertion robot.
The behavior of the robot changes only if for any vector
P
n
the
following equation is true.
t
2
t
2
t
2
b
(7.3)
Provided that the same magnetic tracker is used to control the
robot and to build
M
, if the dispersion of samples of the magnetic
tracker is smaller than the detection range, then the correction of the
(
pX
)
(
pY
)
(
pZ
)
d
xn
mag
yn
mag
zn
mag
n














































































Search WWH ::

Custom Search