Biomedical Engineering Reference
In-Depth Information
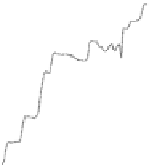
A vasculature model with similar morphology as shown in Fig. 4.27
was used. The reference trajectory was constructed from a set of ive
trajectories and is shown in Fig. 4.31. The robot used for catheter
manipulation was presented in [11].
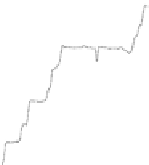
The inexpert user succeeded in entering the correct branch after
six trials; the back and forth motion is shown in Fig. 4.32, where the
value of
c
x
has local maxima at
t
=
0.26,
t
=
0.34,
t
=
0.52,
t
=
0.63
and
t
=
0.77 before reaching the target. At
t
=
0.70, the inexpert user
inserted the catheter into a branch not leading to the target and
then pulled back the catheter between
t
=
0.70 and
t
=
0.84 from
pixel (530; 157) to (339; 188), during that motion, the stress level
reached its global maximum at 12.43% of pixels with stress above
1280
mmHg. The average stress value along the trajectory is 7.31%.
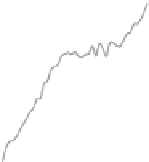
During the robotic manipulation, Fig. 4.33 shows a variation of
c
x
corresponding to the stepping motion of the catheter insertion robot
and shows an insertion to the correct branch in the irst trial. The
average stress value along the trajectory is 6.61% and its global
maximum is 7.44%.
450
10
600
400
9
L1
L2
500
350
8
L3
L4
7
L5
Reference
300
400
6
250
300
5
200
4
150
200
L1
L2
L1
L2
3
L3
L4
L3
L4
100
L5
Reference
100
L5
Reference
2
50
1
0
0
0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
0.0
0.2
0.4
0.6
0.8
1.0
Normalized Time [-]
Normalized Time [-]
Normalized Time [-]
Figure 4.31
Reference trajectory construction for motion capture and
stress variables.
700
Human-X
Human-Y
Reference X
Reference Y
Reference Trajectory
Human
Morphology
650
12
Human
Reference
400
600
550
10
500
300
450
8
400
350
6
200
300
250
4
200
100
150
2
100
50
0
0
0
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
0
100
200
300
400
500
0.0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1.0
600
X-axis [px]
Normalized Time [s]
Normalized Time [-]
Figure 4.32
Catheter driven by an inexperienced person: Insertion path
projection in the XY-plane compared to blood vessel morphology
and reference trajectory, catheter tip tracking in normalized
time for both axes, stress level variation in normalized time.













































































































Search WWH ::

Custom Search