Biomedical Engineering Reference
In-Depth Information
q
2
B
2
R
2
q
1
K
2
J
2
B
1
R
1
(
t
)
K
1
J
1
K
3
x
3
M
3
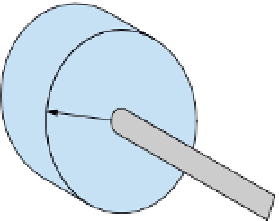
FIGURE 13.76
Illustration for Exercise 6.
6.
Consider the system in the following diagram (Figure 13.76)definedwith
M
3
¼
1kg,
K
3
¼
4N/m
0.5 kg-m
2
,
2 kg-m
2
,
(translational),
J
1
¼
B
1
¼
1N-s-m,
B
2
¼
2 N-s-m,
K
1
¼
2 N-m,
J
2
¼
K
2
¼
1N-m,
R
1
¼
0.2 m, and
R
2
¼
1.0 m. Let t(
t
) be the applied torque,
x
3
be the displacement of
M
3
from rest,
J
2
fromrest (i.e., when the springs
are neither stretched nor compressed). (a) Write the differential equations that describe this
system. (b) If the input is a step with magnitude 10 N, simulate the solution with SIMULINK.
7.
What is the main sequence diagram? How do results from the Westheimer model in
Section 13.3 compare with the main sequence diagram?
8.
Simulate a 20
saccade with the Westheimer model in Section 13.3 with z ¼
and y
1
and y
2
be the angular displacement of the elements
J
1
and
0.7 and
1 N-m. Repeat the simulation for a 5,
10, and 15
saccade. Compare these results with the main sequence diagram in Figure 13.6.
9.
Suppose the input to the Westheimer model is a pulse-step waveform as described in
Section 13.3, and z ¼
o
n
¼
120 radians/s using SIMULINK. Assume that
K
¼
1 N-m. (a) Estimate the size of the step
necessary to keep the eyeball at 20
. (b) Using SIMULINK, find the pulse magnitude that
matches the main sequence diagram in Figure 13.6 necessary to drive the eyeball to 20
.
(c) Repeat part (b) for saccades of 5, 10, and 15
. (d) Compare these results with those of the
Westheimer model.
10.
A model of the saccadic eye movement system is characterized by the following equation.
0.7, o
n
¼
120 radians/s, and
K
¼
10
3
‥
295 y
t
¼
1
:
74
þ
0
:
þ
25y
where t is the applied torque. Suppose t ¼
200
u
(
t
) and the initial conditions are zero. Use
Laplace transforms to solve for
y
(t). Sketch
y
(t).