Biomedical Engineering Reference
In-Depth Information
M
A
F
A
z'
A
CG
r
1
Z
x'
y'
T
r
2
m
foot
g
CP
k
i
j
X
Y
F
g
T
g
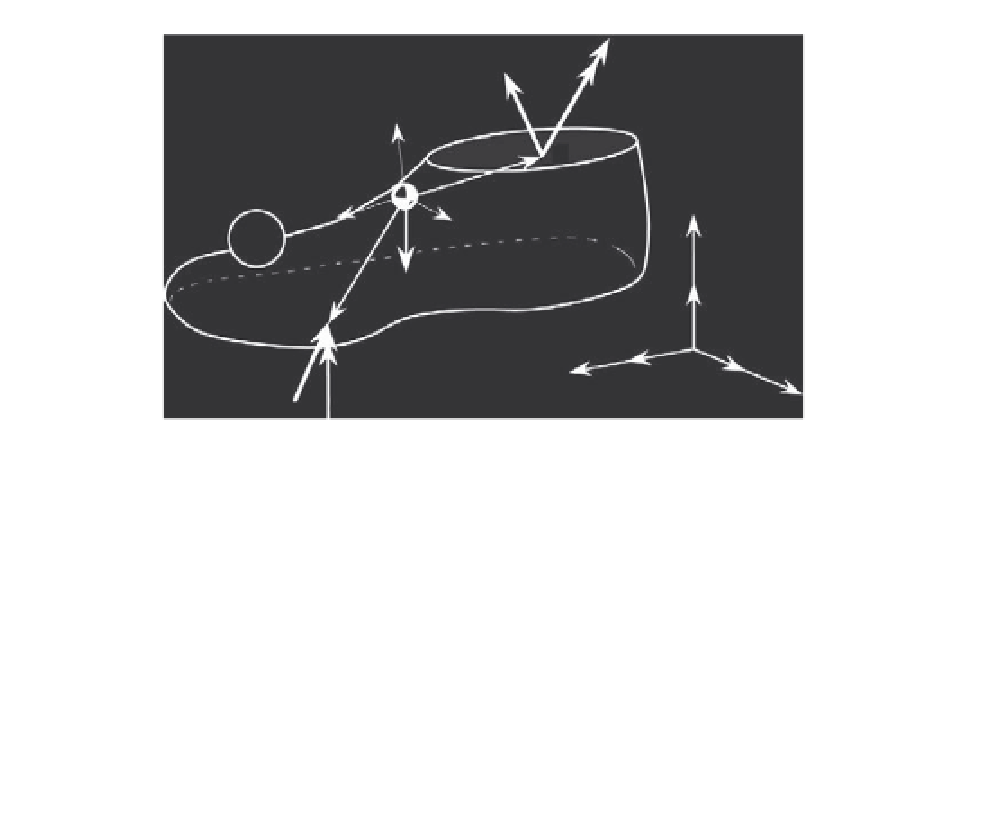
FIGURE 4.30
Ankle A and toe T marker data are combined with ground reaction force data
F
g
and segment
mass and mass moment of inertia estimates to compute the net joint forces and moments.
of the foot
l
foot
may be approximated as the distance between the ankle center and the toe
marker, determined as follows:
T
A
¼ð
0
:
421
0
:
357
Þ
i
þð
0
:
819
0
:
823
Þ
j
þð
0
:
051
0
:
056
Þ
k
¼
0
:
064
i
0
:
004
j
0
:
005
k
l
foot
¼
j
T
A
j
q
ð
2
2
2
¼
0
:
064
Þ
þð
0
:
004
Þ
þð
0
:
005
Þ
¼
0
:
064 m
Then the location of the center of gravity can be determined relative to the ankle center as
0
þ
l
foot
2
ð
T
A
Þ
0
:
064
2
:
064
i
0
:
004
j
0
:
005
k
A
j
¼ð
0
:
357
i
þ
0
:
823
j
þ
0
:
056
k
Þþ
j
T
A
0
:
064
giving the location of the center of gravity:
CG
054
k
which allows computation of position vectors
r
1
and
r
2
(see Figure 4.30). With a foot length
of 0.064 m, a foot mass of 0.365 kg, and a proximal radius of gyration per segment length of
0.690, the mass moment of inertia relative to the ankle center may be estimated with
Eq. (4.40) as
¼
0
:
389
i
þ
0
:
821
j
þ
0
:
2
I
foot=ankle
¼ð
0
:
365 kg
Þð
½
0
:
690
Þð
0
:
064 m
Þ
10
4
kg m
2
The centroidal mass moment of inertia, located at the foot's center of mass, may then be
estimated using the parallel axis theorem (Eq. (4.41)):
I
¼
7
:
12
2
¼
I
m
d
foot
=
cm
foot
=
ankle
foot
Note that the center of mass is equivalent to the center of gravity in a uniform gravita-
tional field. In this case,
d
is the distance between the foot's center of mass and the ankle.