Biomedical Engineering Reference
In-Depth Information
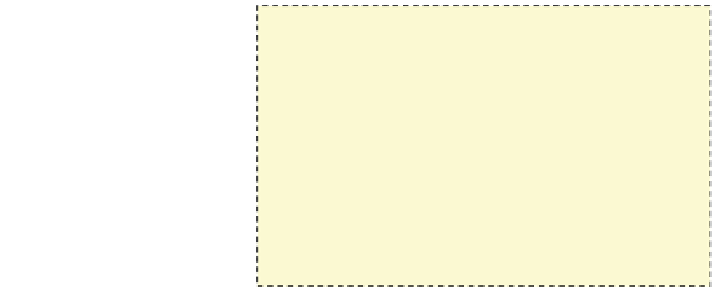
Fig. 3.2 Interacting multiple
model estimator, The IMME
has a four-step process in a
way that different state
models are combined into a
single estimator to improve
performance
x
ˆ
1
(
k
−
1
),
P
1
(
k
−
1
x
ˆ
2
(
k
−
1
),
P
2
(
k
−
1
μ(
k
−1)
Interaction
Interaction and mixing
ˆ
x
01
(
k
−
1
P
01
(
k
−
1
ˆ
x
02
(
k
−
1
P
02
(
k
−
1
Likelihood
update (
M
1
)
Likelihood
update (
M
2
)
ˆ
1
x
ˆ
2
(
k
)
x
(
k
)
<
Measurements
>
Filtering
P
1
(
k
)
z
(
k
)
P
2
(
k
)
<
CV
>
<
CA
>
Λ
1
Λ
1
Mode
probability
update
Mode probability update and
mixing probability calculation
μ(
k
)
Combination of model-conditioned
estimates and covariance
<
Output
>
Combination
()
ˆ
x
k
,
P
(
k
)
probabilities. Note that the previous state of each model is reinitialized by the
interaction stage each time the filter iterates. In IMME, at time k the state estimate
is computed under each possible current model using CV or CA.
In Fig.
3.2
, the mixing probability l
ij
represents the conditional transition
probability from state i to state j. With an initial state of each model (x
i
k
ð Þ
,
new filter state is computed to estimate the mixed initial condition (x
0i
k
ð Þ
and
the associated covariance (P
0i
(k-1)) according to the mixing probability. The
above estimates and the covariance are used as input to the likelihood update
matched to M
j
ðÞ
, which uses the measurement data z
ðð Þ
to yield x
i
ðÞ
and P
i
ðÞ
.
The likelihood function corresponding to each model i
ð
K
i
Þ
is derived from the
mixed initial condition (x
0i
k
ð Þ
and the associated covariance P
0i
k
ð ð Þ
.
After mode probability update based on a likelihood function K
ð ;
combination of
the model-conditioned estimates and covariance is computed for output purposes
with the mixing probability. For our distributed sensory system of target estima-
tion, each filter state of IMM is dedicated for each sensor, and distributed target
estimations independently progress according to each IMME.
3.2.3 Cluster Number Selection Using Gaussian Mixture
Model and Expectation-Maximization Algorithm
For industrial applications of motion tracking, distributed body sensors placed on
target surface with different positions and angles can have specific correlation with
others. That means distributed body sensors can cooperate with each other as a
group with clustering. Recently, several clustering algorithms have been devel-
oped to partition the observations (L) into several subsets (G)[
27
-
38
]. The most
notable approaches are a mean square error (MSE) clustering and a model-based
approach. The MSE clustering typically is performed by the well-known k-means
clustering. In general, k-means clustering problem is NP-hard [
27
], so a number of
heuristic algorithms are generally used [
33
,
35
,
36
].




















































Search WWH ::

Custom Search