Biomedical Engineering Reference
In-Depth Information
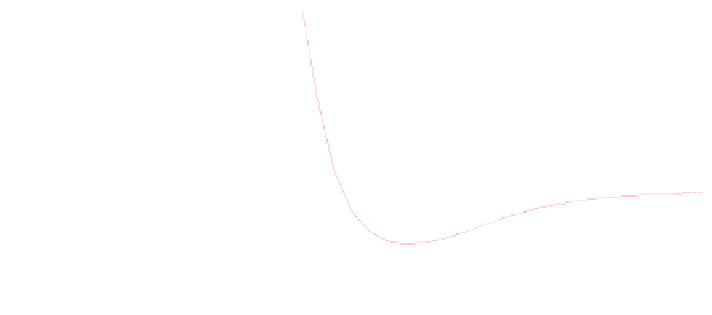
Fig. 3.1 Prediction overshoot
of IMME, This figure shows
the position estimation of
benign motion for the human
chest. The upper bound and
lower bound can be derived
from adding the marginal
value to the measurement and
subtracting the marginal value
from the measurement,
respectively [
15
]
32.5
IMME
Measurement
Upper Bound
Lower Bound
32
31.5
31
30.5
30
Prediction Overshoot
29.5
29
28.5
28
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
Data Time Index (Second)
estimate values of benign motion for the human chest. The typical problem
showed in this figure is that the prediction overshoots at the beginning of tracking
estimation can result in a significant prediction error. This initial estimate error has
motivated us to develop an appropriate method that would reduce the initial
prediction estimate error. Therefore, we propose a new method to reduce the initial
prediction estimate error by employing a tracking relationship of data association
[
1
,
16
-
26
].
As a unique solution to prevent significant prediction overshoots from initial
estimate error, we adopt multiple sensory systems with grouping method based on
GMM for clustering. Clustering is a method that enables a group to assign a set of
distributed sensors into subsets so that distributed sensors in the subset are exe-
cuted in a similar way. A variety of studies have been investigated for clustering
methods based on k-means, spectral clustering, or expectation-maximization (EM)
algorithm [
1
,
2
,
27
-
38
]. However, a known limitation of these clustering methods
is that the cluster number must be predetermined and fixed. Recently, Bayesian
nonparametric methods with Dirichlet process mixture have become popular to
model the unknown density of the state and measurement noise [
39
,
40
]. But,
because of the relatively small set of samples, it will not adequately reflect the
characteristics of the cluster structure [
30
]. For the time sequential datasets of
distributed body sensors, we would like to add a prior distribution on the cluster
association probability [
41
,
42
]. We refer to this prior information as hyper-
parameters [
41
]. Therefore, we proposed a new collaborative grouping method for
distributed body sensors.
Multiple models (MM) may have multiple possible dynamic models for multi-
sensor systems with Markov model switches. In such a hybrid system, the possible
models make multiple sensors supply the information about the interested variable,
and thus are collaborative and complementary. The basic idea of all MM
approaches is that complicated target movements are made up of random varia-
tions originating from basic (straight-line) target motion. Due to the difficulty in
representing this motion simply with a single model, MMs including potentially






















































































































Search WWH ::

Custom Search