Biomedical Engineering Reference
In-Depth Information
Desired signal
d
(
t
)
Predicted position
x
ˆ
t
)
+
Input signal
x
(
t
)
Adaptive transfer
Function with
w
i
(
t
)
Delay
Σ
−
Error signal
e
(
t
)
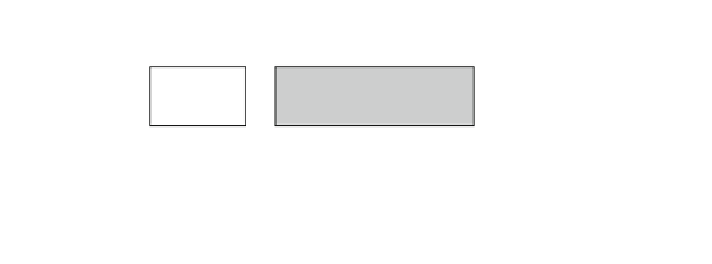
Fig. 2.11 Basic adaptive filtering process for prediction. The predicted position is calculated
using the combination of previous respiratory motion x(t - i) multiplied by its coefficient values
w
i
(t). Here the coefficient values are time-variable according to an optimization process incurred
by an error signal e(t)
x
ð
t
Þ¼
X
n
w
i
ð
t
Þ
x
ð
t
i
Þ;
ð
2
:
11
Þ
i
¼
1
where filter coefficients change over time. Adaptive filters were widely used to
predict the tumor motion [
57
,
74
,
79
,
93
,
95
]. Vedam et al. proved that adaptive
filter models have the prediction accuracy with less than 2 mm and outperform
sinusoidal models [
74
]. Although the adaptive filter has a limitation with 1D
prediction, it is extended into multi-dimensional adaptive filer [
56
]. Adaptive
models can also be adjusted to update the weights of neural networks to improve
the prediction accuracy [
57
,
79
,
94
].
2.3.2.2 Artificial Neural Network
An artificial neural network (ANN), commonly called neural network (NN), is a
mathematical
or
computational
function
technique
that
is
inspired
by
the
Hidden
(
y
j
)
w
ij
1
1
w
jk
Input
(
x
i
)
1
n
i
j
Output
(
z
k
)
k
Bias
B
n
h
Fig. 2.12 An artificial neural network with bias input and one hidden layer. The network
consists of input, hidden, and output layers interconnected with directed weights (w), where we
denote w
ij
as the input-to-hidden layer weights at the hidden neuron j and w
jk
as the hidden-to-
output layer weights at the output neuron k











































Search WWH ::

Custom Search