Biomedical Engineering Reference
In-Depth Information
a
41
a
14
a
42
Hidden States
a
31
Possible observations
a
12
a
23
a
34
IRR
EX
EOE
IN
A
Transition State Matrix
(
a
11
,
a
12
, ...,
a
44
)
a
21
a
33
a
44
a
11
a
22
a
13
Current State Probability
(
b
1
,...,
b
4
)
B
b
1
b
2
b
3
b
4
IRR
EX
EOE
IN
1 =
IRR
, 2 =
EX
, 3 =
EOE
, 4 =
IN
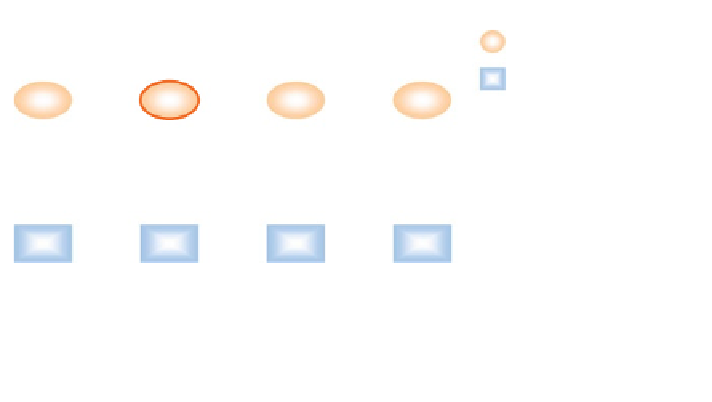
Fig. 2.10 Probabilistic predictive model based on Hidden Markov model. The transition state
probability a
ij
from the present state i to the next state j summarized to unity, such that R
j
a
ij
¼
1
:
The current state probability is calculated based on the time percent in a particular breathing
cycle, such that R
i
b
i
ðÞ¼
1
Riaz et al. implemented an SVM regression model to predict the future location
of the tumor, and showed that the prediction performance of RMSE was less than
2 mm at 1000 ms latency [
56
]. However, the prediction error using machine
learning increased monotonically with fewer data points in the training samples. In
addition, initial model parameters at the beginning of a treatment required to be
adjusted due to the pattern change of a patient respiration [
56
,
61
]. That resulted in
the high computational complexity and the slow response time of prediction [
85
].
2.3.1.7 Hidden Markov Model
A hidden Markov model (HMM) is a statistical probability model with invisible
state transition, where states are not directly visible, but a particular state can
generate one of observations based on observation probabilities [
73
]. In [
73
], state
distributions of the finite state model (FSM)—irregular (IRR), exhale (EX), end-to-
exhale (EOE), and inhale (IN) in three dimension [
78
]—are used to create HMM
with transition state matrix (A) and current state probability (B) based on the
fractional time of a particular breathing cycle. Each state is determined by the
previous state, and is distinguished with velocity (v
i
). We denote a
ij
as the transition
state probability from the present state i to the next state j, such that R
j
a
ij
¼
1, b
i
as
the current state probability to be calculated based on the time percent in a par-
ticular breathing cycle, such that R
i
b
i
ðÞ¼
1, as shown in Fig.
2.10
[
73
].
The transition probability in Fig.
2.10
assumes that there is no possibility of
physical movement from EOE state to EX state, or from IN state to EOE state, and
so on. To eliminate these transition elements, the transition state matrix can be
expressed by replacing those values with zero, as follows:


























Search WWH ::

Custom Search