Biomedical Engineering Reference
In-Depth Information
x
(
t
)
a
0
x
ˆ
t
)
Σ
z
-
1
a
1
z
-
1
a
2
z
-
1
a
n
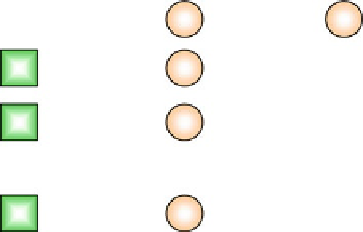
Fig. 2.5 Linear predictor with tapped-delay line. The predicted value is a linear combination of
previous observations x(t - n) and predictor coefficients a
n
that are not changing over time
User defined
u
(
t+
1)
z
(
t+
1)
u
(
t
)
z
(
t
)
Hidden state
Visible
Hidden
H
B
V
,
R
B
H
V
,
R
F
F
x
(
t
-1)
x
(
t
)
x
(
t
+1)
W
,
Q
t
W
,
Q
t
+1
t
−
1
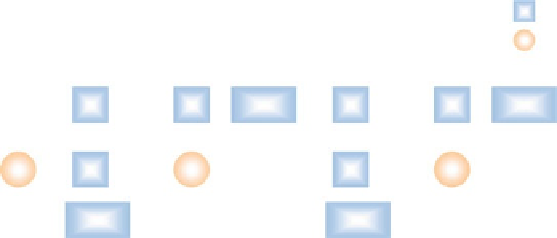
Fig. 2.6 Roles of the variables in the Kalman filter. u(t)isann-dimensional known vector, and
z(t) is a measurement vector. The next state is calculated based on the dynamic equation, such as
xt
þ ð Þ¼
Fx
ðÞþ
Bu
ðÞþ
V . Here, V and W are process noise and measurement noise with
covariance R and Q
2.3.1.2 Kalman Filter
The Kalman filter (KF) is one of the most commonly used prediction methods in
real-time filtering technologies [
72
,
73
,
75
,
81
-
83
]. KF provides a recursive
solution to minimize mean square error within the class of linear estimators, where
linear process and measurement equations to predict a tumor motion can be
expressed as follows [
84
]:
x
ð
t
Þ¼
Fx
ð
t
1
Þþ
Bu
ð
t
1
Þþ
W
;
z
ð
t
Þ¼
Hx
ð
t
Þþ
V
;
ð
2
:
2
Þ
where we denote the state transition matrix as F, the control-input matrix as B, and
the measurement matrix as H. u(t)isann-dimensional known vector, and z(t)isa
measurement vector. The random variables W and V represent the process and
measurement noise with the property of the zero-mean white Gaussian noise with
covariance,
¼
Q
ðÞ
, respectively. The
matrices F, B, W, H, and V are assumed known and possibly time-varying (Fig.
2.6
).
EW
ðÞ
W
ðÞ
T
¼
R
ðÞ
and E V
ðÞ
V
ðÞ
T





































Search WWH ::

Custom Search