Biomedical Engineering Reference
In-Depth Information
< Prediction >
y
1
RMLP for
Marker
1
RMLP for
Marker
2
RMLP for
Marker
3
Marker 1
y
2
Coupling
Matrix
(Π)
Marker 2
Σ
Prediction
y
3
Marker 3
CP
w
1
2
CP
EKF for Marker
1
Innovation:
α
1
CP
EKF for Marker
2
Innovation:
α
2
CP
EKF for Marker
3
Innovation:
α
3
CP
w
d
1
3
CP
w
d
2
d
3
<
Correction
>
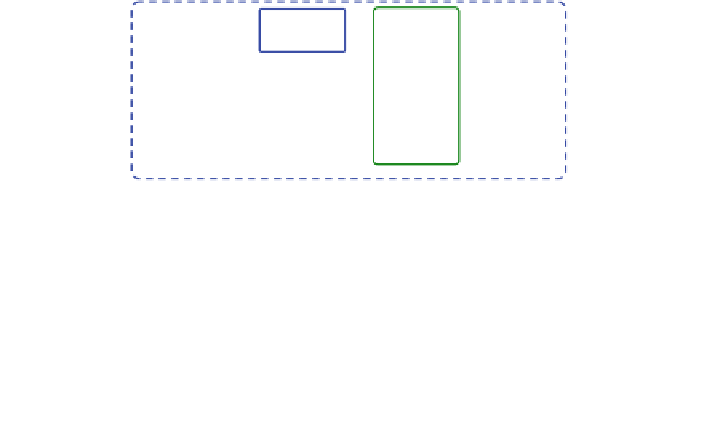
Fig. 5.1 Multiple marker interactions for the individual patient. The respiratory motion prediction
for each patient is composed of the prediction process and the correction process. The prediction
process is comprehensively organized with the multiple markers by adapting the coupling matrix
growth rate for the computational complexity and storage requirement of the
network would be proportional to output nodes (p) and weights to the second
power (s
2
). Here, output nodes and weights correspond to the patient number for
predicting the respiratory motion and the state number for the prediction process.
For large weights s, we may need highly demanding computational resources for
these requirements to predict respiratory motions. We may partially release such
requirements by using the Decoupled extended Kalman filter (DEKF) as a prac-
tical
remedy
to
overcome
computational
limitations
with
the
computational
complexity of an order of p 9 (s/p)
2
[
29
,
30
]..
The key idea of the DEKF is to use interactive state estimates of certain weight
groups based on the neural node in such a way that the prediction process operates so-
called mutually exclusive weight groups in the recurrent network [
29
]. That leads to
the impairing of the computational accuracy of predicting respiratory motions based
on the recurrent network because it ignores interactions of excluded weight states.
Therefore, we propose a prediction process for each patient based on RNN using a
coupling matrix, in which we adapt the coupling technique to comprehensively
organize state estimates of multiple markers for predicting respiratory motions. That
approach creates multiple recurrent multilayer perceptron (RMLP) as a part of
predictive excitation for separate input markers in Fig.
5.1
.
In Fig.
5.1
we denote the marker number (i) as the designated marker number
for the mutually exclusive groups, where an individual RMLP corresponds to each
marker that consists of breathing motion vectors (three-dimensional coordinates)
with time sequence k. After finishing the first step of the prediction process for
each marker, we define the innovation process ai
CP
(k) (53) and the filtered weight
vector
ˆ
i
CP
(k) (55), as shown at the EKF block for each marker in Fig.
5.1
.




































Search WWH ::

Custom Search