Biomedical Engineering Reference
In-Depth Information
P
b
a
σ
rr
= -
p
T
=
T
0
P
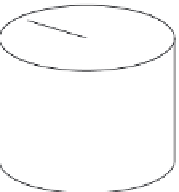
FIGURE 3.1
Geometry and loading of the hollow cylinder.
and
∫
σ −
dS
P
(3.6)
zz
S
where
a
and
b
denote, respectively, the inner and outer radii of the bone, and
S
is the cross-sectional area. For a long bone, it is assumed that all displace-
ments, temperature, and electrical potential except the axial displacement
u
z
are independent of the
z
coordinate and that
u
z
may have linear depen-
dence on
z.
Using Equations (3.1) and (3.2), differential equations (3.3) can be
rewritten as
2
2
∂
∂
1
∂
∂
∂
∂
1
∂
∂
1
=λ
∂
∂
T
r
+
T
=
0,
c
+
rr
u
−
(3.7)
11
r
1
2
2
2
r
r
r
r
r
2
∂
∂
1
∂
∂
+
(
cu
+ϕ=
e
)
0
(3.8)
44
z
15
2
r
r
r
2
∂
∂
1
∂
∂
(3.9)
+
(
eu
−κϕ=
)
0
15
z
1
2
r
r
r
The solution to the heat conduction Equation (3.7)
1
satisfying boundary
conditions (3.5) can be written as
ln(/)
ln(/)
ra
ba
T
T
=
0
(3.10)
It is easy to prove that Equations (3.7)-(3.9) will be satisfied if we assume
Bt
r
()
+
ϖ
rra
c
[ln( /) 1]
−
(3.11)
uAtr
=
()
+
r
11