Biomedical Engineering Reference
In-Depth Information
Y
F
(
t
)
Flexible beam
X
PVDF Films
Support 1
Silicon base
Support 2
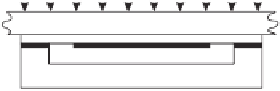
Figure 4.14
Cross section of the sensor unit (one tooth)
assures that the performance of all sensor units is essentially similar. Therefore, the
operation of this array can be studied and analyzed by considering a single sensor unit
and only one tooth of the grasper.
The cross section of the sensor unit subjected to a time-dependent force
F
(
t
) is shown
in Figure 4.14. In Figures 4.13 and 4.14, the
X
and
Y
directions are selected, similar to
the traditional notation in classical mechanics. In order to find the softness of the grasped
object, both the amplitude of the applied load and the resultant deflection are required
simultaneously. The sensing mechanism utilizes PVDF films, both in the thickness mode
at the end supports to measure the applied load, and in extensional mode attached to
the flexible beam to measure the bending stresses. Knowing the applied load from the
PVDF films at the supports and the amount of deflection or the equivalently developed
bending stresses from the middle PVDF film, softness characterization of the objects is
feasible. The concept of the sensor operation is depicted in Figure 4.15. As can be seen
Hard object
(a)
bje
c
(b)
o
(c)
PVDF films
at supports 1 and 2
work in thickness mode
PVDF film that
works in extensional mode
Figure 4.15
The basic scheme for the proposed softness sensing technique