Biomedical Engineering Reference
In-Depth Information
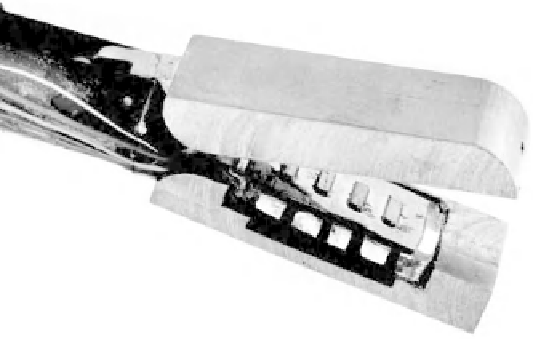
Figure 4.8
Photograph of the prototyped endoscopic grasper integrated with the tactile sensor
(See Plate 1)
using a compression block to ensure even adhesion, after which it was cured inside an
oven at 50
◦
C for a period of 1 hour. A 6 mm thick Plexiglas substrate of 25
×
45 mm
dimensions was prepared, and a uniform layer of nonconductive glue was applied. The
Plexiglas substrate was glued to the PVDF film such that the PVDF film was sandwiched
between the Plexiglas and the silicon. The whole assembly was compressed using a
compression block and cured at 50
◦
C for 1 hour. An illustration of this miniaturized
sensor integrated onto an endoscopic grasper is shown in Figure 4.8.
4.1.3 Experimental Analysis
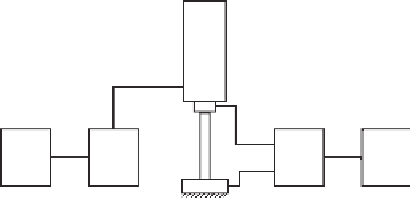
An experimental set-up was developed to analyze the performance of the sensor (see
Figure 4.9). A 2 mm diameter circular probe, which was driven by a vibration unit and
actuated by a 15 Hz sinusoidal signal, was used to apply a force. The charge generated
by the four piezosensitive regions was amplified using a charge amplifier and the output
was measured using an oscilloscope. The magnitude of the applied force was determined
by a force transducer inserted between the probe and the vibration unit.
To avoid damage to the sensor, the maximum applied load was limited to 2 N.
Figure 4.10 shows the typical response of each PVDF sensor, which indicates that the
A- Power amplifier
E- Oscilloscope
B- Signal generator
C
F- Force transducer
C- Bruel & kjaer vibration unit
G- Probe
D- Charge amplifier
H- Tactile sensor
F
G
A
B
D
E
H
Figure 4.9
Experimental measurement set-up