Biomedical Engineering Reference
In-Depth Information
and the fingers, a tactile display needs to have more than 1000 stimulator elements. The
maximum frequency of perceptible vibrations is 1000 Hz [59], in which the maximum
sensitivity is at 250 Hz [58]. The maximum deformation of the skin at the fingertips is
3 - 5 mm [60]. The pain threshold is 3.2 N at a pin diameter of 1.75 mm, corresponds to
a pressure of 1.3 MPa [60]. The minimum perceptible deformation is between 0.07 mm
[56], when the finger is allowed to move across a pattern and 2 mm [56] without relative
motion. Moy and Singh [57] specified the requirements for an ideal device for realistic
tactile feedback as being 500 mN mm
-2
peak pressure, 4 mm stroke, 50 Hz bandwidth
and an actuator density of 1 per mm
2
.
A realistic feedback in haptic devices, and one which is an important requirement in
tactile displays, is that which combines both kinesthetic and tactile feedback. The tactile
sensation in real manipulation tasks depends on the current position of the human fingers
and is always accompanied by kinesthetic sensations. For kinesthetic feedback, force
feedback gloves exist that measure the finger positions for calculating the appropriate
forces. A tactile display incorporated into a data/force feedback glove would complete
the haptic sensation. This demands a thin, flexible, and lightweight tactile display that
allows free movement of the hand and fingers.
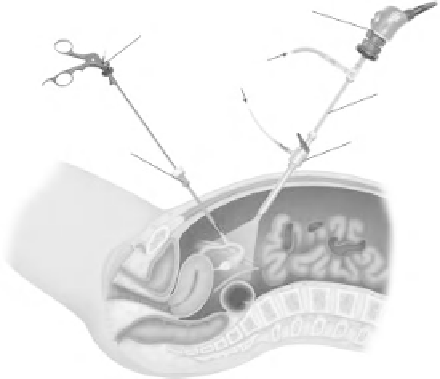
1.12 Minimally Invasive Surgery (MIS)
As previously mentioned, MIS is the practice of performing surgery through small inci-
sions or 'ports' in the body through which specialized surgical instruments are inserted,
as shown in Figure 1.6. During conventional 'open' surgery, significant trauma is cre-
ated at the incision site, which results in postoperational pain and discomfort [61 - 63].
By contrast, MIS procedures result in reduced bleeding and discomfort, improved patient
recovery time, and reduced cost.
Notwithstanding its theoretical advantages, however, MIS is more difficult to perform
than conventional open surgery due to the lack of advanced tools and the extensive training
Video camera
Grasper
Light source
CO
2
Laparoscope
10mm trocar
5mm trocar
Figure 1.6
Access to internal tissues during surgery