Biomedical Engineering Reference
In-Depth Information
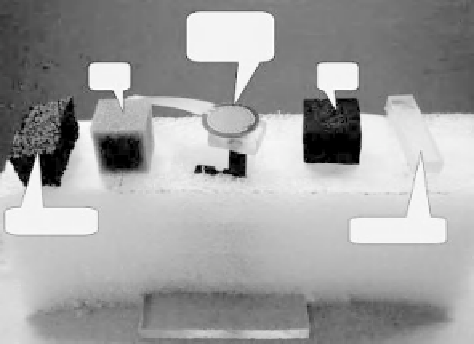
Linear
actuator
A2
B1
ICF400
Plexiglas
Figure 11.25
Experimental setup (See Plate 23)
Table 11.2
Results of the first human subject test
Simulated material
ICF400
A2
B1
Plexiglas
Recognized
25
25
25
25
Not recognized
0
0
0
0
Table 11.3
Results of the second human subject test
Material
A2-FR
3
/
4
inch
A2
3
/
4
inch
Recognized
15
12
Not recognized
10
13
The processing software gathered information from the applied force to the shaft of a
linear actuator and the position of the shaft. By having this information, and using the
lookup table, the response of the material to the applied force was extracted from the
table and used as the input for a PID controller, which prepared the necessary commands
for the linear actuator to move the shaft.
Experiments on the tactile display were conducted by human subjects and the results
were registered. Different materials were simulated by the tactile display and compared
to the real objects. The results showed that the developed tactile display can replicate the
softness of materials very closely and has proved to be a feasible technique with great
potential for future use in robotic and minimally invasive surgery (MIS).