Biomedical Engineering Reference
In-Depth Information
through instruments. There are reports of surgeons performing laparoscopic surgery who
found that the lack of direct access to the tissue by the finger, as well as insufficiency
of visual feedback, rendered it impossible for them to feel the presence of tumors in
underlying body tissue. This lack of tactile feedback makes certain tasks more difficult,
as has been proven by experiments performed by Massimino and Sheridan [8]. Additional
experiments demonstrated the importance of tactile feedback such as simple tracking tasks
[9], reaction time reduction in target pointing [10], and in degraded visual conditions [8].
One of the surgeon's most important assets is a highly developed sense of touch.
Surgeons rely on sensations from the finger tips to guide manipulation and to perceive a
wide variety of anatomical structures and pathologies [11]. In current minimally invasive
methods, as previously mentioned, the surgeon's perception is limited to visual feedback
or force feedback from the handles of their instruments. Various tactile sensors have
recently been developed which can be mounted in a probe, or in a surgical instrument,
from which any tactile information sensed is transmitted through a controller to a tactile
display which reproduces the tactile stimulus. By using these remote palpation devices, the
surgeon may get back some of the perceptual and manipulative skills of conventional open-
incision surgery. Among the tactile feedback parameters, scientists are also investigating
force reflection [12], vibration [13], and small-scale shape recognition [11]. For example,
in the case of shape recognition, which is important for many surgical tasks, such as
finding tumors, a tactile sensor array in the tip of surgical instrument or probe measures
the distribution of stress after contacting the tissue. This data is then processed by a
computer using signal-processing algorithms, after which the output data is either shown
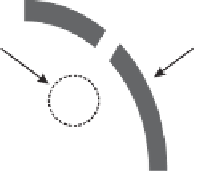
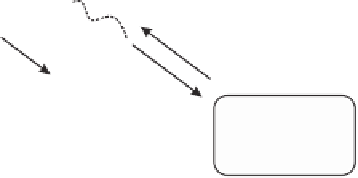
on a video screen or represented on a tactile display. A schematic remote palpation system
is represented in Figure 10.1.
Tactile Display
Surgical Instrument
or Probe
Tactile
Sensor
Skin
Signal Processing
and Control Unit
Target Tissue
Figure 10.1
Schematic view of remote palpation system