Biomedical Engineering Reference
In-Depth Information
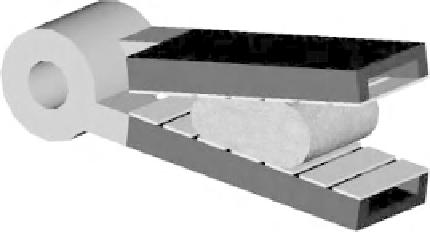
Upper jaw
Soft object
Y
Lower jaw
(Sensorized)
X
Figure 8.14
A view of the grasper with one active jaw equipped with an array of seven sensing
elements
Buffer
AI<0.
.n>
−
+
Programmable
instrumentation
amplifier
+
Floating
signal
source
+
Vs
Input multiplexers
−
PGIA
+
−
AI SENSE
Measure
voltage
Vm
−
AI GND
I/O Connector
Selected channel in RSE configuration
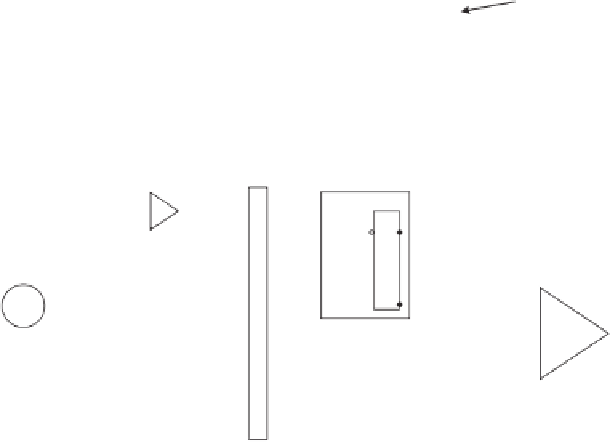
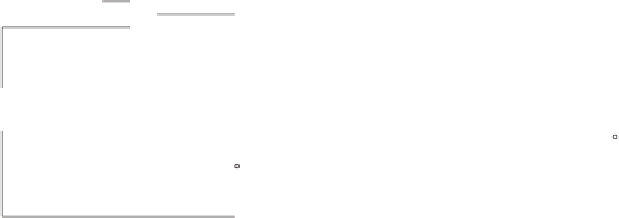
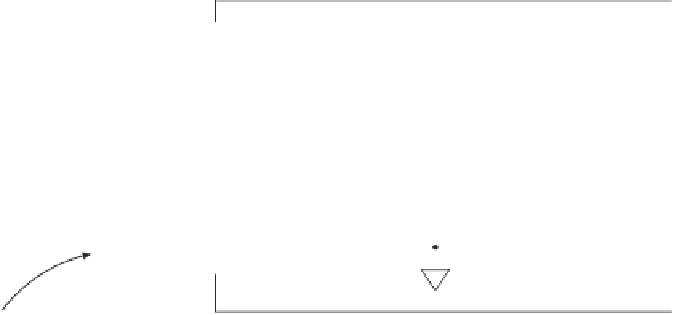
Figure 8.15
The connections from PVDF to DAQ amplifier. In this figure, only the first channel
is shown. The amplifier is multiplexed between all input channels
lump in
y
direction can be considered as lump depth). In both designs, when there is no
extraneous feature in the soft object, and depending on the grasper geometry and design,
all sensing elements show either an equal output voltage or exhibit a smooth pattern that
is considered to be the background frame. The presence of a lump causes an uneven
voltage distribution across the sensing elements. The deduction of the background frame
from the total response results in the net effect of the lump and increases the sensitivity.
In addition to lump detection, the softness of the bulk soft object in the sections with no
embedded masses can also be measured [5].
The outputs of the sensing elements depend on several factors, such as the ratio of the
Young's modulus of the lump (
E
L
) to that of the tissue (
E
T
), the size and depth of the lump
and the magnitude of the applied load. Extracting all features of the lump from the minimal
sensor used in this study is a challenging task, as some combinations of lump stiffness,
size, depth, and applied force create a similar output pattern. This complexity is also
reported by other researchers [6]. However, there are some constraints that can be used
to reduce the number of variables or, at least, to control their range. For instance, our