Biomedical Engineering Reference
In-Depth Information
40.00
35.00
30.00
25.00
20.00
15.00
10.00
5.00
0.00
(a)
(b)
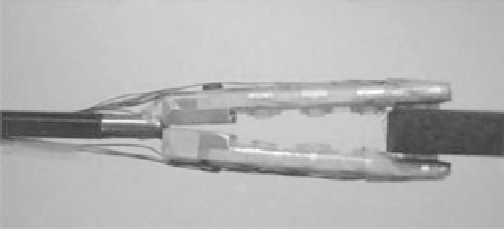
Figure 8.8
Grasper is touching an elastomeric object (with softness of 36 Shore A. (a) Softness
display representation. (b) Photograph of the grasper and the grasped object
where:
G
U
1
=
I
U
1
G
U
M
+
2
3
=
I
U
2
G
U
2
M
+
1
3
=
I
U
3
G
U
M
=
I
U
4
(8.4)
and,
⎨
I
U
2
−
I
U
1
M
−
,1
<j<
M
+
2
3
G
U
j
=
I
U
1
+
(j
−
1
) .
1
3
G
U
j
=
I
U
2
+
j
−
M
+
3
.
I
U
3
−
I
U
2
M
−
M
+
2
3
2
M
+
1
3
,
<j<
(8.5)
1
⎩
3
G
U
j
=
I
U
3
+
j
−
.
I
U
4
−
I
U
3
M
−
2
M
+
1
2
M
+
1
,
<j<M
1
3
3
3
G
L
j
can be obtained in a similar way.