Biomedical Engineering Reference
In-Depth Information
is measured. The steepness is the slope of the force - angle curve averaged over the angle
axis, again from the beginning of the loading phase to the measuring angle. For example,
the steepness at 40
◦
is the slope averaged from 50
◦
(the beginning of the loading phase)
to 40
◦
. To compare the softness of the grasped objects, the energy, or steepness, of each
object is compared at an arbitrary angle.
5.5 Calibrating the Grasper
The MIS grasper has, by necessity, to make several mechanical connections, of which
all produce friction. The force used to overcome this friction can, itself, cause errors
in determining the softness of the objects, especially when the objects themselves are
probably very soft, since grasping soft objects requires only a small amount of force
compared to the frictional force.
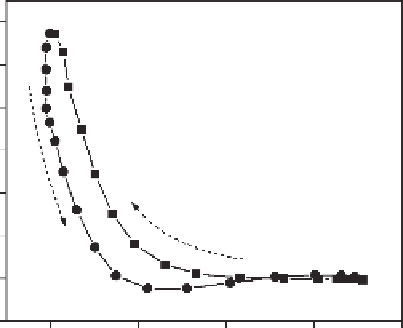
Figure 5.9 shows the experimental force - angle curve data for an empty grasper in both
its loading and unloading phases. When an object was grasped, and in order to minimize
the effect of friction, this extra force had to be subtracted from the real force that was
applied to the object. In order to accomplish this, a formula was required to calculate
the frictional force at each angle. Using the least squares error method, a curve fitted on
the experimental data. Figure 5.10 shows the experimental data of several consecutive
loading curves. The following fourth-order curve was fitted to the experimental data:
f
=
6.9
×
10
−
7
4
−
1.58
×
10
−
4
3
+
1.31
×
10
−
2
2
θ
θ
θ
−
0.47
θ
+
6.11
(5.4)
The result of subtracting the frictional force is shown in Figure 5.11. Figure 5.11a
represents the grasping action for an empty grasper. Figure 5.11b shows the calculated
force using Equation 5.4. Figure 5.11c shows the compensated curve when all frictional
forces are completely removed.
6
5
4
3
2
1
0
0
20
40
60
80
Angle (Degree)
Figure 5.9
Experimental force - angle curve data for an empty grasper