Cryptography Reference
In-Depth Information
F
h
F
h
F
h
-1
F
h
-1
S
2k+1
S
2k+1
S
2k+1
S
2k+1
2
2
2
2
H
K
H
K
z
z
z
-1
z
-1
U
U
P
P
S
K
S
K
P
P
U
U
S
K
S
K
F
l
F
l
F
l
-1
F
l
-1
2
2
L
K
L
K
2
2
S
2k
S
2k
S
2k
S
2k
(a)
(a)
(b)
(b)
Lifting Scheme
(Analysis Filterbank)
Lifting Scheme
(Analysis Filterbank)
Inverse Lifting Scheme
(Synthesis Filterbank)
Inverse Lifting Scheme
(Synthesis Filterbank)
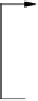
Fig. 3.4.
Lifting scheme for the (5, 3) wavelet transform [3]. (a) Decomposition. (b)
Reconstruction.
3.2.1 Temporal Scalability
Motion Compensated Temporal Filtering (MCTF)
The temporal scalability is achieved by Motion Compensated Temporal Filtering
(MCTF), which is responsible for the wavelet decomposition/reconstruction
along the motion trajectory. The MCTF is conducted independently in each
spatial layer.
To reduce complexity and ensure perfect reconstruction, the MCTF is im-
plemented by a Lifting Scheme. Particularly, in SVC [9], the MCTF is largely
restricted to a special Lifting Scheme that has only one prediction or update
step. Fig. 3.4 shows an example of such a scheme. Here S
k
denotes the k-th
input frame and S
2k
represents an even-indexed frame. The term S
2k+1
stands
for an odd-indexed frame. As shown, the decomposition mainly consists of 3
operations, which are (1) Polyphase Decomposition, (2) Prediction, and (3)
Update. To produce the high pass signal h
k
, an odd-indexed frame is predicted
from the output of the Prediction Filter (P), which uses the even-indexed
frames as input. The residue then forms the high pass frame. Accordingly, in
order to generate the low pass frame l
k
, an even-indexed frame is updated
using the output of the Update Filter (U), which takes the high-pass frames
as input,
−
1
h
k
S
2k+1
−P
(5,3)
(S
2k
)=S
2k+1
2
(S
2k
+ S
2k+2
) ,
(3.1)
1
4
(h
k
+ h
k−1
) .
l
k
S
2k
+ U
(5,3)
(h
k
)=S
2k
+
(3.2)
For better understanding, we show the MCTF structure using the (5, 3)
wavelet. Eq. (3.1) and (3.2) define the operations of prediction and update
steps for the (5, 3) wavelet. According to Eq. (3.1), the high pass frame h
k
is
the residual frame after an odd-indexed frame is predicted from the adjacent
even-indexed frames. Similarly, using Eq. (3.2), the low pass frame l
k
is ob-
tained by updating an even-indexed frame by means of the adjacent high pass