Cryptography Reference
In-Depth Information
or duration t from the first control point. For each control point on Q(D), we
interpolate a corresponding point that has the same cumulative length onto
D(Q). In a Query-By-Sketch (QBS) video retrieval system, the d value is used
as the basis to conduct the alignment task, because we only consider the sim-
ilarity between Q and D in the spatial domain, as shown in Fig. 9.4. On the
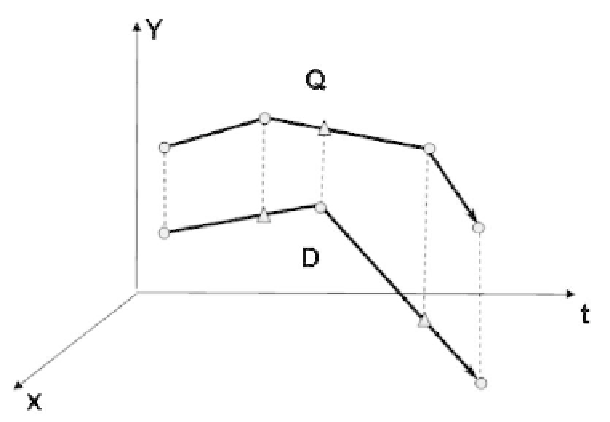
other hand, the t value plays a crucial role when a video retrieval system incor-
porates the Query-By-Example (QBE) approach, as shown in Fig. 9.13. The
control points and the corresponding points are labelled by circles and trian-
gles, respectively. In this scenario, the insertion of corresponding points on Q
and D is dependent on either d or t. Now, for each control point on the trajec-
tory Q(D), we can interpolate a corresponding point located on D(Q). Assume
the total number of control points and their corresponding points located on
Q and D are both N .LetQ
′
′
′
′
N
′
′
′
′
N
be the set of points (including the control points and inserted corresponding
points) located on Q and D, respectively. We call the points in set Q
′
and
D
′
check-points, each of which can be represented by (x+,x−,y+,y−)inthe
spatial domain. To compare two arbitrary trajectories, we use the matching
process described in Section 9.2.3. The process is executed repeatedly until
the computed distance is larger than δ, or there are no more intermediate
check points within each sub-trajectory. Since most of the trajectories are fil-
tered out by checking the first few control points, our proposed algorithm is
very e
cient. Furthermore, the partial matching problem can be solved by
choosing two distinct control points on D as the new start and end points of
D.
:Q
1
,Q
2
,,Q
and D
:D
1
,D
2
,,D
Fig. 9.13.
The alignment task in QBE.