Cryptography Reference
In-Depth Information
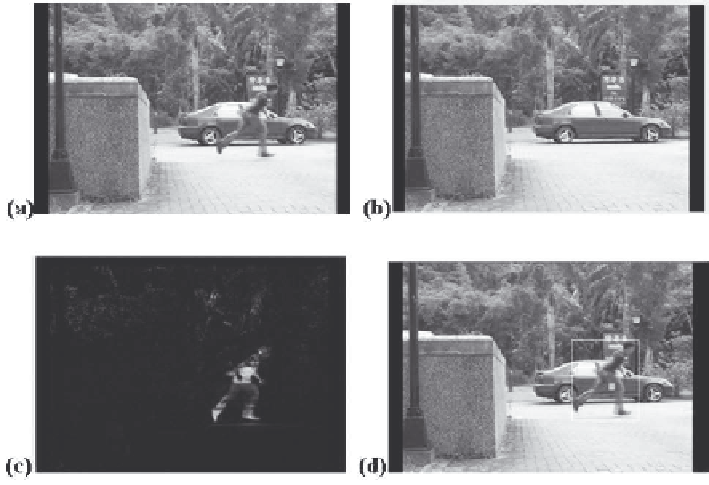
Fig. 9.2.
Background estimation and foreground segmentation. (a) Original frame.
(b) Background model. (c) Foreground pixels. (d) Detected moving subject.
9.2.2 Color-Based Blob Tracking
In this section, we propose a hybrid blob tracker that is comprised of two
stages. The first stage is executed by a color-based blob tracker, which provides
reliable and fast tracking results if the moving blobs are pre-segmented.
Color-Based Blob Tracker
After background estimation, an estimated foreground can be derived. Ideally,
residual pixels obtained after applying background subtraction should repre-
sent foreground objects. However, noise, such as that caused by wavering tree
branches, needs to be filtered out. Therefore, morphological operations are
performed to remove noise. In the meantime, blobs with high connectivity
can be separated from residual pixels and detected as foreground objects.
In order to satisfy the real-time constraint, we employ color histograms to
characterize the extracted blobs. Although a color histogram is not the best
nonparametric estimator [22], it is a good target tracker due to its low compu-
tation cost. Moreover, since it disregards all geometric information, it is robust
against complicated non-rigid motions. Using a color histogram, a target R
and its corresponding candidates P can be modelled as