Biomedical Engineering Reference
In-Depth Information
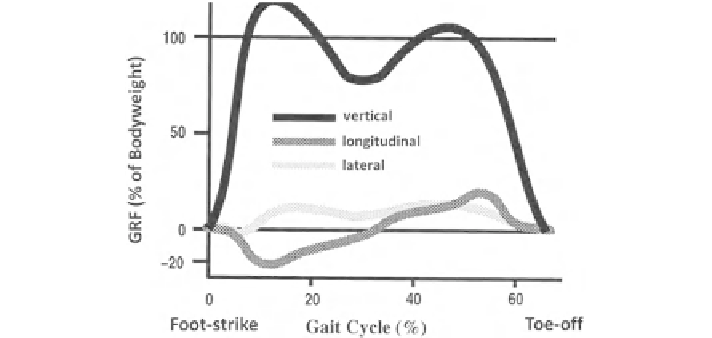
Fig. 3.4
Ground reaction force (GRF) measured below a foot while walking. Adapted from [
87
]
on presence. But it could be possible to go further by adapting the force to speed and
any other parameter. It could also be possible to analyze these forces instantaneously
on an equipped treadmill (with force sensors) to predict changes of speed and gait
parameters of the user. See Chung and Wang [
16
] for detailed correlations of the
vertical ground reaction force and speed and gender.
However, some authors have shown that GRF differs when walking on a treadmill
compared to the ground [
84
] because the treadmill does not perfectly apply a constant
velocity, especially at foot-strike, which is associated with a high friction force of the
treadmill surface. Moreover, the horizontal components of GRF are strongly affected
by the fact that the contact foot is pulled over the treadmill surface compared to normal
ground walking where the user voluntarily applies a horizontal component of force.
If no force device is available in the system, joint torques and forces can be deduced
using inverse dynamics, as described in Part 2, Chap.
3
“sensing human walking” of
this topic. This method is very sensitive to the anthropometric data used to model the
body, as shown by [
51
,
56
]. Despite these differences, there exists a general pattern
for these joint torques. Many researchers in biomechanics have studied how torque
is adapted to different populations (elderly, young, obese or disabled people).
Force might be an important sensory feedback when walking. The Walking-
In-Place technique [
65
] enables a real physical movement (similar to some extent to
natural walking), which leads to real contacts with the ground. The user has to con-
sciously walk in place while motions of his body are tracked and analyzed [
21
,
72
,
83
]. In this case, the feedback associated with GRF is not simulated, but intrinsically
delivered by the motion performed by the user.
Force information can also be used inVR to compute other sensory feedbackwhen
walking in virtual environments. For example, shoe-based devices can be associated
with real time audio simulation [
49
]. Contact sensors embedded in shoes are used to
detect footsteps and both vibro-tactile and auditory feedback is provided to match a
specific virtual ground surface. Tactile tiles can also be used with spatialized audio
in a CAVE to provide a complete simulation using the haptic, auditory and visual