Biomedical Engineering Reference
In-Depth Information
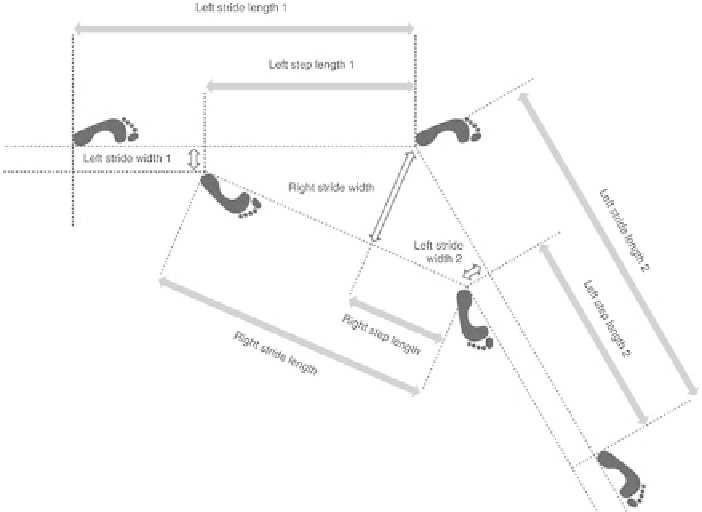
Fig. 3.1
Definition of step length and width in curved walking. Adapted from [
30
]
Whatever the strategy is, some authors have shown that the formation of tra-
jectories during goal-oriented locomotion in humans demonstrates several general
properties [
26
]. This stereotype appears in both the trajectory and the velocity profile
for goal-oriented locomotion (such as starting from one point with a given orienta-
tion and reaching another point with an imposed final orientation). This stereotype
is shown in Fig.
3.2
.
This stereotype seems to be associated with a maximization of the smoothness
of the trajectory [
53
]. Hence humans seem to minimize the Jerk (derivative of the
acceleration) [
22
] and the snap (second derivative of the acceleration) [
57
]. Hence,
these authors [
57
] suggested to design optimal controllers based on Jerkminimization
to compute these stereotyped trajectories for various conditions.
Similarly to arms movements [
79
], it seems that trajectories in natural locomotion
[
25
,
77
] obey the power law:
p
V(t)
=
K
·
R
(
t
)
where K is a constant, V(t) is the instantaneous velocity, R(t) is the instantaneous
radius of gyration and p is a real value. For elliptic motions, p has been identified to
be close to 1/3, but it seems to change according to the shape of the trajectory.
All of these results tend to show that there is a control of the trajectory instead of
a control of the foot placement. This could be an important issue when simulating
human navigation in virtual environments. Some approaches tend to control camera