Biomedical Engineering Reference
In-Depth Information
f
11
f
12
f
ij
x
11
x
12
x
ij
F
c
1
F
c
F
c
2
x
c
2
R
R
2
x
c
1
x
c
p
R
(
x
)
R
1
f
14
f
13
T
1
T
2
x
13
x
14
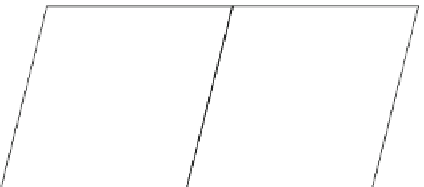
Fig. 17.9
Left
a normal force distribution
p
R
(
x
)
during foot-floor contact the and associated contact
centroid position
x
c
, which is used to mediate interaction with an augmented floor surface.
Right
a
pressure distribution
p
R
(
x
)
on a region
R
spanning adjacent tiles. The weighted sum of centroids
x
c
is the centroid location for the distribution with support
R
=
R
1
R
2
. It lies on the line segment
connecting
x
c
1
and
x
c
2
. The difference
δ
x
=
x
c
1
−
x
c
2
provides information about contact shape
0.6
0.3
0
0
0.3
0.6
0.9
1.2
1.5
1.8
Position, m
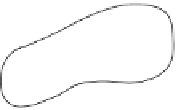
Fig. 17.10
A recorded sequence of contact centroids produced by an individual walking across the
floor. Data was sampled each 100ms to produce the figure. Each
square
corresponds to one floor
tile. When the foot lies on a single tile, as weight shifts from heel to toe, an array of centroids is
produced, moving in the direction of travel. At inter-tile boundaries, at each instant one centroid is
produced on each tile with which there is contact
The contact centroid lies within the convex hull of the contact area (dashed line,
Fig.
17.9
), at the centroid of the pressure distribution [
7
], and thus provides a concise
summary of the foot-floor contact locus, but not about shape or orientation. When
the foot-floor contact area
R
overlaps multiple tiles, a pressure centroid
x
c
can be
computed by combining those (
x
ck
) for each tile, via
x
c
=
w
1
x
c
1
+
w
2
x
c
2
, where
w
k
=
F
. This makes it possible to continuously track contact across tile bound-
aries. The difference vector
F
i
/
x
c
2
is indicative of the orientation and extent
of the contact distribution at the boundary (Fig.
17.9
).
A sequence of contact centroid locations produced by an individual walking across
the floor is shown in Fig.
17.10
. When there is multi-tile foot-floor contact, as illus-
trated in the sequence shown, we use a simple clustering algorithm to associate
nearby contact centroids that are assumed to belong to the same foot, combining
those from nearby tiles.
Contacts were measured to be localized with a typical accuracy of 2 cm, with
worst-case errors of
δ
x
=
x
c
1
−
3 cm, considerably smaller than the linear dimensions of the
tile (30 cm) or the typical width of an adult shoe. Distortion was observed to be
highest, and accuracy lowest, near the edges of the tile.
≈