Biomedical Engineering Reference
In-Depth Information
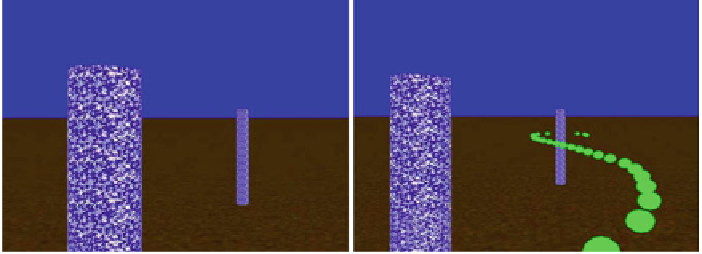
(a)
(b)
Fig. 15.3
Example displays from the baseline/controlled speed (
a
) and controlled path (
b
) condi-
tions similar to those used in the figure-8 experiment conducted by Gerin-Lajoie et al. [
12
]
Consider the problem of evaluating the functional mobility of patients with a knee
injury—a tear in their anterior cruciate ligament (ACL)—before and after surgery.
Functional mobility in the real world subjects the knee joint to a wide range of
forces and torques at various joint angles and velocities and with various patterns of
muscular co-contraction, which are not currently measured in a clinical assessment.
We are beginning to develop a battery of functional mobility tasks that exploit the
flexibility of ambulatory VR to manipulate the affordances of the environment and
capture the natural range of variability in an assessment context. Tests may include
turns of varying curvature, quick stops and sharp reversals, stepping over gaps of
varying widths, stepping up or down through various heights, and so on.
As a first step, Gérin-Lajoie et al. [
12
] developed an over-ground walking task in
a virtual environment that varied the path's radius of curvature, to assess the impact
of an emulated knee disability on the locomotor trajectory. Participants wearing an
immobilizing knee splint walked in a figure-8 path around two virtual poles 6m apart.
Therewere threeVR conditions: (1) natural walking at a self-selected pace, (2) speed-
controlled walking, in which auditory feedback prompted participants to maintain
a speed at or above their natural walking pace, and (3) path-controlled walking,
in which participants followed virtual markers while receiving performance-based
auditory feedback (Fig.
15.3
). The participant's trajectory was then assessed to iden-
tify gait impairment indicators, and revealed a trade-off between path curvature and
walking speed. Specifically, participants with an immobilized knee either decreased
their speed to maintain path geometry, or increased their path radius to maintain
walking speed, compared to the controls.
In addition, for the first time we exploited nonlinear dynamical methods to ana-
lyze the structure of variability at the level of the locomotor trajectory. Recurrence
quantification analysis (RQA)
9
of the heading direction provided several measures of
repeating temporal patterns in the trajectory as a participant walked the figure-8 path.
9
RQA is a nonlinear measure that indexes repeating, or recurrent, patterns in a time series. For a
review see Webber and Zbilut [
71
,
72
].