Biomedical Engineering Reference
In-Depth Information
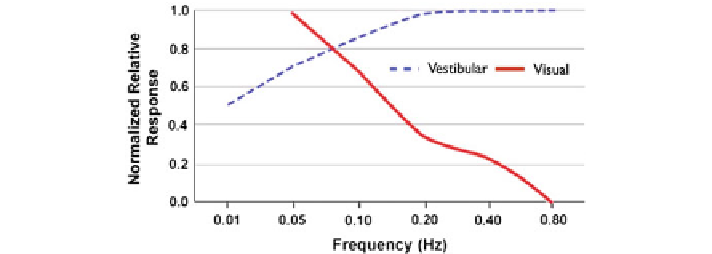
Fig. 11.9
The visual-vestibular crossover. This graph shows, in the frequency domain, the relative
contributions of visual and linear vestibular cues to postural stability. (Adapted from Duh et al. [
8
],
reproduced from Razzaque [
27
])
that visual perception is more sensitive at low frequencies of motion and vestibular
perception (sensed by the otoliths and semicircular canals) is more sensitive at higher
frequencies (Fig.
11.9
). These results suggest that when the head is not moving or
is moving at slow frequencies, that the visual system is dominant. As head angular
velocity increases, the vestibular sense comes to dominate the visual.
The important outcome of Hosman and van der Vaart's research is the observation
that when people turn their heads, the vestibular system dominates and visual manip-
ulation may go unnoticed. Rotation of the virtual scene during head turns is therefore
less likely to be detected because when people turn their heads at normal angular
velocities the vestibular system dominates the visual system. As a point of reference,
an angular rotation of 0.5Hz corresponds to taking 2 s to rotate your head all the way
fromone side to the other and back; note that higher angular rotation frequencies (and
faster head turns) are further to the right in Fig.
11.9
where vestibular cues almost
totally dominate visual.
The egocentric direction hypothesis, Gibson's theories of optic flow, and studies about
the visual-vestibular crossover all provide theoretical support for manipulating the
views of the virtual scene to cause the user's virtual direction to differ from her real
direction. These techniques are employed in the following locomotion interfaces.
11.3.2.2 Interfaces
Motion compression (MC) [
19
,
33
] has a misleading name because it does not in fact
compress motion. Instead, MC rotates the virtual scene around the user and remaps
areas of the scene that were outside of the tracked-space into the tracked space. The
MC algorithm predicts a user's goal location based on points of interest in the scene
toward which the user may be walking. The algorithm then maps the straight line
of the path from the user to the predicted goal location onto the largest possible arc
that will fit into the tracked space. MC continuously updates the goal location and