Biomedical Engineering Reference
In-Depth Information
(a)
(b)
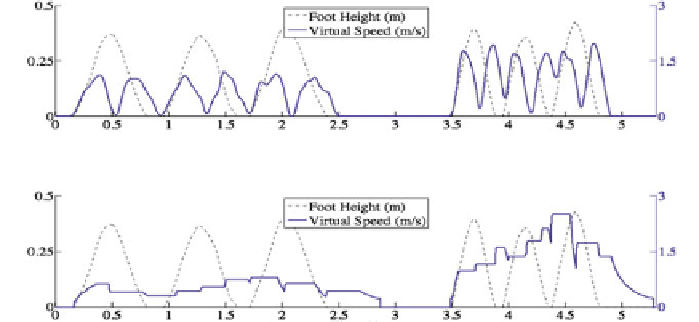
Fig. 11.7
Solid lines
are the output speed profiles for (
a
) LLCM-WIP and (
b
) GUD-WIP at two
walking speeds.
Dotted lines
are the height of
one
ankle. The trace of the other ankle's height would
be the same shape, but offset so that its peaks are in the gaps. In
a
, note the dips toward zero in
LLCM-WIP output during the double-support event between steps, offset by the
100ms latency.
In
b
note the three changes in speed during each step and that the speed does not dip to nearly zero.
You can also see the
∼
∼
500 ms stopping latency. (Figure adapted from Wendt et al. [
41
])
11.2.2.1 Hands-Free Direction Setting Techniques
Head-directed motion
. Often called
gaze-directed
, head-directed motion uses the
forward direction of the (head-tracked) head pose as the direction of motion. This
requires no additional apparatus and is easy to implement and learn to use. However,
the user cannot move and look around at the same time, as people normally do.
Slater's team's neural-network-based WIP system used head-directed motion [
35
].
Torso-directed motion
. Torso-directed motion is one of several direction-setting
techniques that depends on data from trackers located on the user's body. A tracker
on the user's torso (front or back; chest or hips) can be used to set “forward” to
be the direction the user's body is facing. Use of the additional tracker means that
torso-directed movement is independent of head orientation, so users can walk and
look around at the same time. A limitation of such body-worn tracker techniques
is that users cannot move backwards or sideways, as both of those motions require
decoupling direction of motion from the direction the body is facing.
Gesture-controlled direction
. Gesture-controlled direction setting techniques inter-
pret tracked movements of the user's hands, head, legs, or feet to establish direction
of movement. While we would argue that any use of gestures reduces the naturalness
of walking-metaphor interfaces, gestures are frequently used. In Gaiter, sideways
motion is enabled by swinging the leg to the side from the hip; backward motion is
enabled by kicking backward from the knee [
36
].