Biomedical Engineering Reference
In-Depth Information
General goals for locomotion interfaces
. To be widely adopted, a locomotion in-
terface for IVEs has more requirements than simply enabling movement from place
to place. Other desirable features of locomotion interfaces include:
•
Is easy to learn and easy to use; incurs low cognitive load;
•
Leaves the user's hands free so she can use task-related tools;
•
Does not increase occurrence or severity of simulator sickness;
•
Prevents users from running into real-world obstructions and walls;
•
Minimizes encumbrances
- Is easy to don and doff;
- Ensures that equipment, including safety equipment, does not interfere with
other task-related gear the user may be wearing;
•
Minimizes required supporting infrastructure, e.g., tracking systems, for portabil-
ity and cost.
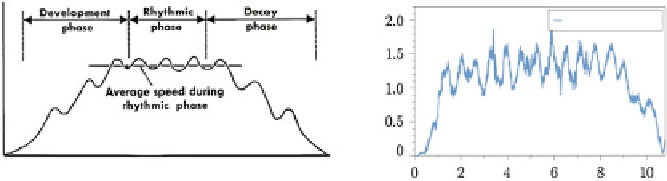
Goals for setting speed
. The notional speed versus time profile (Fig.
11.1
a) is a
standard against which to compare similar speed/time profiles for our interfaces.
Figure
11.1
b shows an actual profile generated from (noisy) head-tracker data. The
same development, rhythmic, and decay phases are visible in both profiles. We pro-
pose four design goals for setting user speed:
•
Starting and stopping latency should be minimized. Movement in the virtual scene
should begin as soon as the user initiates a step and stop when the user stops step-
ping. Starting latency is annoying for casual walking and interferes with the timing
of quick movements. Stopping latency can result in overshooting the desired stop-
ping location leading to unintended collisions with or interpenetration of objects
in the scene.
•
Users should be able to adjust their speed continually during a step, as we can with
natural walking. If speed is controlled by data measured only once per step, e.g.,
foot-strike or foot-off speed, continuous control of speed is not possible.
(a)
(b)
Fig. 11.1 a
Notional speed versus time plot for one start-to-stop walking event.
b
Speed versus
time plot computed from head-tracker data. The higher frequency variations in speed are caused
by fore-aft head bob and roughly correspond to steps. Notice that during the rhythmic phase, speed
stays well above zero. We try to replicate the general shape of the speed profile with our interfaces.
(
a
Adapted from Inman [
14
];
b
reproduced from Wendt [
40
])