Biomedical Engineering Reference
In-Depth Information
virtual
scene
coordinates
lab
y
g
T
[
y
]
lab
y
virtual
camera
coordinates
lab
z
g
T
[
z
]
lab
z
(a)
physical volume
(b)
scaled virtual volume
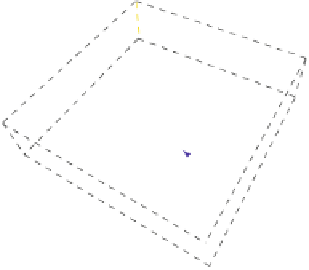
Fig. 10.2
Illustration of translation gains: (
a
) physical interaction volume in the virtual reality
laboratory with size
3
,and(
b
) virtual environment interaction volume with
(
lab
x
,
lab
y
,
lab
z
)
∈ R
3
scaled by translation gains
(
g
T
[
x
]
·
lab
x
,
g
T
[
y
]
·
lab
y
,
g
T
[
z
]
·
lab
z
)
∈ R
size
Translation Gains
Translation gains define the ratio between real and virtual head translations [
32
].
Similar to rotation gains, scaled translations can be described with translation gains
g
T
3
, which are applied to relative changes in the position
=
(
g
T
[
x
]
,
g
T
[
y
]
,
g
T
[
z
]
)
∈ R
x
(
n
)
y
(
n
)
z
(
n
)
3
for frame
n
of the user's head
(Δ
,Δ
,Δ
)
∈ R
∈ N
:
r
r
r
⎛
⎝
⎞
⎠
=
⎛
⎝
⎞
⎠
·
⎛
⎝
⎞
⎠
⎛
⎝
⎞
⎠
·
x
(
n
)
100
x
(
n
−
1
)
x
(
n
)
Δ
g
T
[
x
]
000
0
g
T
[
y
]
00
00
g
T
[
z
]
0
0001
v
y
(
n
)
v
010
y
(
n
−
1
)
r
y
(
n
)
Δ
v
z
(
n
)
v
001
z
(
n
−
1
)
r
z
(
n
)
Δ
v
1
v
000 1
r
1
For instance, uniform scalings in horizontal walking directions are often applied
in immersive virtual environments allowing users to cover a larger distance in the
VE when walking in the physical workspace [
37
], which can be described with
translations gains
g
T
[
x
]
=
1 (see Fig.
10.2
). This causes
a position change of the user's head in the real world
g
T
[
z
]
>
1, and
g
T
[
y
]
=
x
(
n
)
y
(
n
)
z
(
n
)
3
(Δ
,Δ
,Δ
)
∈ R
r
r
r
x
(
n
)
y
(
n
)
z
(
n
)
to be transferred to the VE as
, i.e., horizontal
movements along the
x
- and
z
-axes are scaled uniformly, whereas vertical head
bobbing movements along the
y
-axis are unaffected.
However, this approach still results in the problem that lateral head movements
are scaled while a user walks, which can be distracting for the user [
11
]. Instead of
scaling all horizontal motions with a translation gain, Interrante et al. [
11
] proposed
scaling translations only in a user-specified walking direction (i.e., the
seven league
boots
metaphor). Using a similar approach, Steinicke et al. [
32
] proposed using
the yaw orientation of the user's head as approximation of walking direction [
1
]to
(
g
T
[
x
]
·
Δ
,Δ
,
g
T
[
x
]
·
Δ
)
r
r
r