Biomedical Engineering Reference
In-Depth Information
Velocity and acceleration of the foot while natural walking are very high. It is
much difficult for the motion platform to trace the foot. This characteristic limits
practical use of the GaitMaster.
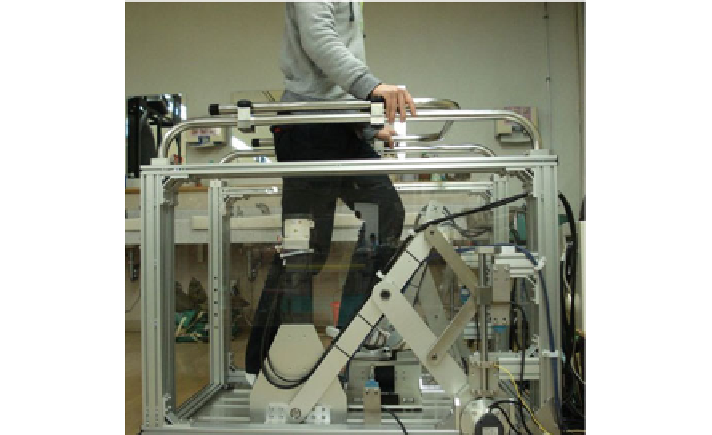
9.4.4 GaitMater for Walking Rehabilitation
One major field of application for locomotion interfaces such as the GaitMaster is
rehabilitation. If the foot of a patient is connected to the motion platform, it can assist
walking. Interestingly, a high performance of the motion platform to follow the foot
trajectory is not required for this application.
A simplified version of the GaitMaster was therefore designed for rehabilitation
purpose [
33
,
34
]. It moves each foot via a motion platform with two degrees of
freedom (back and forth and up and down), which allows for repeated walking
cycles, makes it possible to attach and detach easily, and permits to moderately
restrain the body (Fig.
9.12
). Given the range of movement of human joints, the
device is so designed as to only move the feet, leaving to the user's voluntary control
movements of the joints in the legs, the hips, and other parts of the body. By doing
so, a compatibility between, a high amount of exercise and a relatively moderate
resulting restraint could be achieved.
Fig. 9.12
Simplified GaitMater for walking rehabilitation