Biomedical Engineering Reference
In-Depth Information
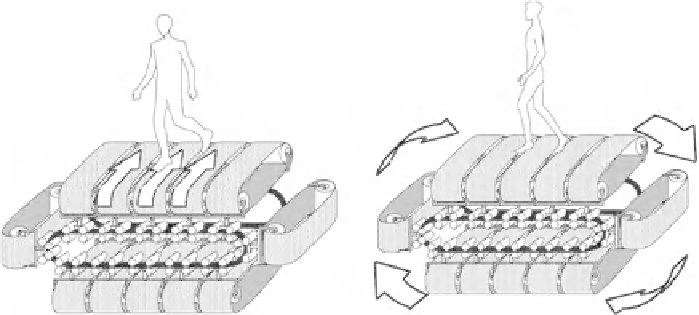
Y direction
X direction
Fig. 9.6
Structure of Torus Treadmill
The shape of a closed surface, in general, is a surface with holes. If the number
of holes is zero, the surface is a sphere. The sphere is the simplest infinite surface.
However, the walking area of the sphere is not a plane surface. A very large diameter
is required to make plane surface on a sphere, which restricts implementation of the
locomotion interface.
A closed surface with one hole like a doughnut is called torus. A torus can be
implemented by a group of belts. These belts make a plane surface for the user to
walk on. A closed surface with more than one hole cannot make a plane walking
surface. Thus, the torus is the only form suitable for a locomotion interface.
The “Torus Treadmill” device is implemented by a group of belts connected to
each other. The Torus Treadmill is realized by these belts [
10
]. Figure
9.6
illustrates
the basic structure of the Torus Treadmill. The first prototype of the Torus Tread-
mill employed twelve treadmills. These treadmills move the walker along an “X”
direction. Twelve treadmills are connected side by side and driven in a perpendicular
direction. This motion moves the walker along a “Y” direction.
Figure
9.7
shows overall view of the apparatus. Twelve treadmills are connected
to four chains and mounted on four rails. The chain drives the walker along the Y
direction. The rail supports the weight of the treadmills and the walker. An AC motor
is employed to drive the chains. Each treadmill is equipped with an AC motor. In
order to shorten the length of the treadmill, the motor is put underneath the belt.
A problem with this mechanical configuration is the gap between the belts in the
walking area. In order to minimize the gap, a driver unit was put on each treadmill
in alternating orientation. The gap achieved is only 2 mm wide in this design.