Biomedical Engineering Reference
In-Depth Information
The most popular approach consists in tracking the orientation of the pelvis. Hence
placing a sensor on the pelvis, such as inertial, magnetic or gyroscope sensors (or
a combination of these sensors), could provide a good compromise. Indeed, some
authors have shown that the pelvis orientation can provide an early prediction of the
running orientation of a rugby player even in deceptive motions where the subject
tries to provide fake information to an opponent [
4
]. The pelvis' trajectory is thus
strongly linked to the actual orientation of the user while other body parts may also
perform other tasks while walking.
In the same way, detecting a change in walking direction is very difficult. Indeed,
the trajectory of the center of mass and of a point placed on the pelvis could be
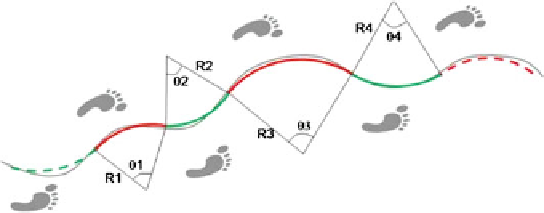
viewed as a series of arcs of circles, even for straight-line walking. Some authors
[
24
] have proposed to model the natural sinusoidal trajectory of the center of mass as
a sequence of arcs of circles (see Fig.
8.1
). This model assumes that the body could
be viewed as an inverted pendulum which basis is the contact foot.
The authors defined a statistical relation between speed and curvature for straight-
line walking. Thus turning could be determined when a new point in the speed-
curvature space does not fit this relation.
This is a very important issue in immersive environments as we need to detect a
subtle change in direction when the subject is walking in order to react in a proper
manner when he wishes to change the walking direction. In some works in virtual
reality, it leads to exaggerating some indices such as the head inclination in Walk-
In-Place interfaces [
34
].
As shown by many authors [
28
] the head is viewed as a stable inertial platform
which acceleration profile is unchanged even for various gait styles [
11
] and for
uneven terrains [
21
]. To stabilize this inertial platform, the orientation of the head
changes in direction 200ms before the remaining of the body turns. In case of natural
walking, the coordination between head and pelvis could enable us to early determine
the orientation of the next step. However, in VR, this could be a problem if the screen
is static and placed in front of the user. As the user will orient his head in the direction
of the screen this natural behavior disappears. Because of constraints due to the visual
Fig. 8.1
The trajectory of the center of mass is modeled as a sequence of arcs of circles which
parameters are the radius of gyration R
i
and the velocity (represented here by the angle
=
θ
i
(
V
i
∗
duration
)/
R
i
(where V
i
is the average speed within the ith arc). Adapted from [
24
]