Biomedical Engineering Reference
In-Depth Information
actual head position is known, so the system must provide a metaphor for controlling
the viewpoint using devices such as joysticks, mice, keyboards, etc. At the other
extreme, such as mixed-reality displays, because the user can move through the full
extent of the VE, head tracking is sufficient to give us the relevant viewpoint. In
between there might be a hybrid: tracking the head over its limited range of motion,
and providing a separate control mechanism for movement over longer distance.
We can thus identify several types of interaction device that might be used:
•
Pose & movement sensors
•
Position trackers
•
Hand-operated devices
•
Hybrid devices
As with the display types identified in the previous section, the distinctions
between these types are quite subtle. Furthermore, any one device might incorpo-
rate elements of two or more of these types (e.g., a handheld device that contains a
joystick and a position tracker). We also note that there are hundreds, perhaps thou-
sands, of devices that are available for interaction in VEs. We'll thus pick some key
examples that are either historically important or are very widely available and thus
commonly used.
We start with pose & movement sensors (also called inertial sensors) because they
are commonly available and cheap. This type of sensor is usually an integrated unit
that can sense orientation and some types of movement: three DoF for an accelerom-
eter that detects linear acceleration (including gravity, which can be used to estimate
pitch and roll orientation), three DoF for a gyroscope that measures changes in rota-
tion, and three DoF for a compass that can give an absolute heading. In 2012 a
modern smartphone would typically include all of these sensors and a GPS unit to
give
5-10 m accurate global position information. This data is not itself sufficient
to generate, for example, a precisely registered augmented reality (Fig.
7.10
), as the
sensors are not very high quality and do not give precise readings that are registered
in local coordinates. It is not generally possible to build a local position tracking
system from an accelerometer because the sensors drift over time. In addition the
∼
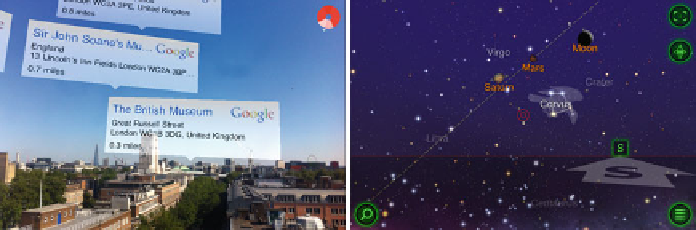
Fig. 7.10
Left
acrossair browser, acrossair, showing museums south from University College
London.
Right
Star Walk, Vito Technology, Inc