Biomedical Engineering Reference
In-Depth Information
3
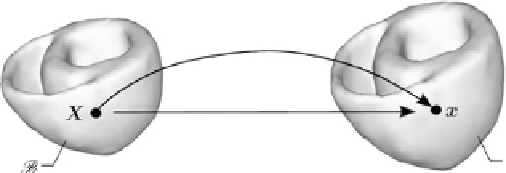
Fig. 13.1
Motion of an excitable and deformable solid body in the Euclidean space
R
through
the nonlinear deformation map
ϕ
t
(
X
)
at time
t
. The deformation gradient
F
=∇
X
ϕ
t
(
X
)
describes
the tangent map between the respective tangent spaces
13.2.1 Kinematics: Active-Passive Decomposition
3
be the reference configuration of an excitable and deformable solid
body that occupies the current configuration
Let
B
⊂ R
3
S
⊂ R
at time
t
∈ R
+
as shown
Fig.
13.1
. Accordingly, material points
X
∈
B
are mapped onto their spatial posi-
tions
x
∈
S
through the nonlinear deformation map
x
=
ϕ
t
(
X
)
:
B
→
S
at time
t
.
The deformation gradient
F
acts as the tangent map
between the tangent spaces of the respective configurations. The gradient operator
∇
X
[•]
:= ∇
X
ϕ
t
(
X
)
:
T
X
B
→
T
x
S
denotes the spatial derivative with respect to the reference coordinates
X
and
the Jacobian
J
det
F
>
0 is the volume map.
Following the kinematics of finite plasticity (Kröner,
1960
; Lee,
1969
) and the
recent work by Cherubini et al. (
2008
), the deformation gradient is multiplicatively
decomposed into the passive part
F
e
:=
and the active part
F
a
,i.e.
F
e
F
a
.
F
=
(13.1)
In this multiplicative decomposition, the active part evolves with the transmembrane
potential
Φ
and reflects the underlying actively contracting anisotropic architecture
of cardiac tissue through its dependence upon the second-order structural tensors
A
m
,
A
n
, and
A
k
F
a
=
F
a
(Φ,
A
m
,
A
n
,
A
k
).
(13.2)
For an orthotropic contractile material, the active part of the deformation gradient
can be expressed as
λ
a
m
−
1
A
m
+
λ
n
−
1
A
n
+
λ
k
−
1
A
k
,
F
a
=
1
+
(13.3)
where
λ
α
=
ˆ
λ
α
(Φ)
for
α
=
m
,
k
,
n. Undoubtedly, the passive and active parts of the
deformation gradient are not gradients of any nonlinear deformation map. Hence,
the compatibility condition cannot be fulfilled by the active deformation. This leads
to an incompatible fictitious intermediate configuration. The compatibility of the
overall deformation, on the other hand, is satisfied by the passive part of the defor-
mation gradient
F
e
. This is evident from the fact that while
F
a
is rotation-free with
respect to the material directions,
F
e
embodies the rotational part.