Biomedical Engineering Reference
In-Depth Information
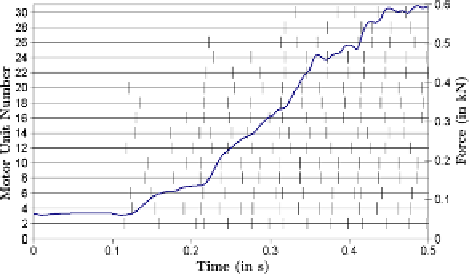
Fig. 8.2
The force output
profiles of the TA with 30
motor units and a linear
excitatory drive function as
input to the Fuglevand et al.
(
1993
) motor unit recruitment
model. Figure is taken from
Röhrle et al. (
2012
)
output is the resulting muscle force subject to zero-displacement boundary con-
ditions (isometric contraction). The advantage of the modular framework, as pre-
sented in Fig.
8.1
, is its versatility. For example, it is straight forward to exchange
the MU recruitment model with a different neuro-physiological model of MU re-
cruitment. Further, the knowledge of the action potential within the interior of the
muscle can serve as source for the computation of a virtual EMG signal. Computing
such a virtual EMG signal allows to test and investigate specific MU recruitment
hypotheses—particularly in conjunction with experimental measurements. Further,
by generating artificial EMG signals of multiple muscles within a musculoskeletal
system, one can identify suitable EMG recording locations that minimize cross-talk.
Further, such a model can provide the basis for investigating complex EMG sig-
nals taken from a musculoskeletal system, e.g., EMG signals taken from the biceps
brachii and triceps brachii of the upper limb, which shall serve as input to forward-
dynamics simulations of three-dimensional (continuum-mechanical) models.
8.5 A Multiscale Forward-Dynamics Musculoskeletal Simulation
Framework
Without further investigating the ability to use EMG-signals in three-dimensional
forward-dynamics simulations, it is more essential to develop a new and com-
putationally efficient framework appealing to principles of forward dynamics and
continuum-mechanics. In a first step, as outlined in the following, only activation-
driven forward-dynamics simulations are considered. Full path-guided forward-
dynamics simulations are subject to future work.
An efficient three-dimensional continuum-mechanical forward-dynamics simu-
lation can be achieved by coupling the finite element method with rigid-body dy-
namics through nested iteration. The nested-iteration method is an efficient solution
technique that aims to obtain a good initial guess for a nonlinear problem and mesh
discretization by solving the problem on coarser meshes. Nested iteration builds on
the idea that solutions on coarser meshes provide, through interpolation, a good ini-
tial guess to a nonlinear problem on a finer mesh. This provides two advantages: