Biomedical Engineering Reference
In-Depth Information
targets based on their CT coordinates. The same approach has been used by
Matthäus for accuracy estimation of the original robotized TMS system [
14
].
For this TMS experiment, we use the standard procedure for any stimulation
with the robotized system (cf.
Sect. 1.3.2.2
): First, a head contour from the CT-
scan is generated. A headband with passive marker spheres is placed on the
phantom's forehead to track the head (see
Sect. 1.2.1
)
. With a pointer we perform
a registration of the headband to the virtual head contour using a combined
landmark and Iterative Closest Point (ICP) registration step. Headband and pointer
are tracked by the tracking system. As treatment coil, we use a MagStim 70 mm
Medium Coil (The Magstim Company Ltd., Whitland, Wales, U.K.) that has a
small hole in the center. Thus, the current coil position can be easily compared
with the target position. The coil is mounted to the robot's end effector (Adept
Viper s850) and is registered to the effector using three points on the coil's surface
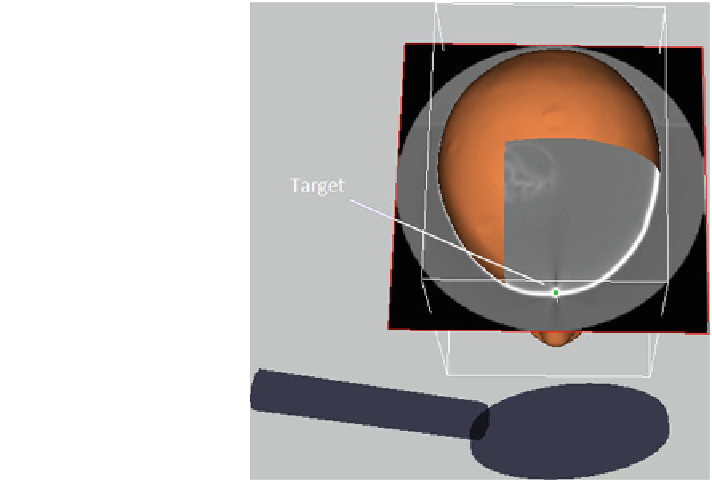
that are measured with the pointer. The stimulation or target points are now
selected in the CT-scans. This is illustrated in Fig.
4.8
, where the virtual head
contour is visible with the CT-data. The small metal implant is visible as a bright
point in the scan and is selected as the target point. Afterwards, the coil is moved
to the selected points with the robot using the three different calibration methods,
which are the QR24 algorithm, the method by Tsai and Lenz, and the presented
online calibration method, respectively. Subsequently, the difference between
current coil position and target point is measured.
With this realistic robotized TMS setup, we can effectively measure the posi-
tioning error of the robotized TMS system. This is not possible during a real TMS
Fig. 4.8 Selection of the
target points for the TMS
experiment. Tiny metal
implants can be easily
detected in the CT-scan
(bright sphere) and are used
as target points
Search WWH ::

Custom Search