Biomedical Engineering Reference
In-Depth Information
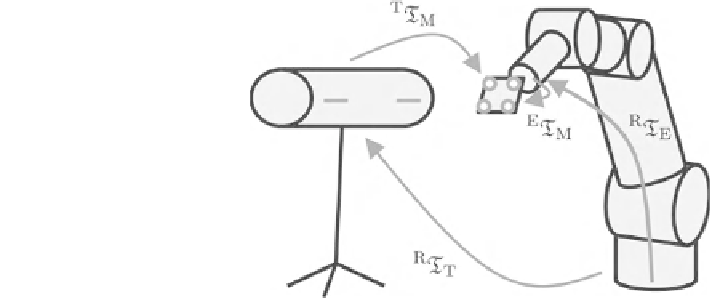
Fig. 4.3 Principle of hand-
eye calibration: A marker M
is attached to the robot's end
effector E and measured by
the tracking system T. Hand-
eye calibration (or tool/flange
and robot/world calibration)
is used to determine the
unknown transforms
R
T
T
, the
transform from robot's base
to the tracking system, and
E
T
M
, the transform from end
effector to marker
multiple positions A
; ð Þ
i
. By eliminating one of the two unknown matrices, we
yield the simplified equation A
j
A
i
X
¼
XB
j
B
i
,
8
i
;
j.
The first works solving this problem used matrix algebra and took advantage of
the special properties of homogeneous matrices. In this solution, the rotational and
translational parts of the unknown matrix X were calculated separately. This
solution was presented independently by Shiu and Ahmad [
20
,
21
] and Tsai and
Lenz [
24
,
25
]. Note that, with X the transform Y can easily be computed by matrix
multiplication afterwards. A first comparison among these solutions found that the
method by Tsai and Lenz performed slightly better than the algorithm by Shiu and
Ahmad [
26
] which is due to a different implementation. Further algorithms also
computed the rotational and translational parts separately. Quaternion algebra [
4
],
screw motion analysis [
3
], the Euclidean group properties [
15
], and solving of
nonlinear equations [
7
,
10
,
11
] was used in these methods. Li and Betsis described
methods using a geometric approach, a least-squares solution and a nonlinear
optimization problem for hand-eye calibration [
13
]. Their comparison to the
methods presented in [
25
] and [
10
] showed, however, that the method by Tsai and
Lenz performed best and proved to be as good as their new nonlinear optimization
method. As a next step, new solutions that simultaneously calculated the rotational
and translational part of X were presented. A dual quaternion approach was used
by Daniilidis [
5
]. Also, minimizing of a non-linear cost function by a one-stage
iterative algorithm [
28
,
31
], nonlinear minimization of a sum of scalar products
[
17
], and a stochastic model [
22
] were introduced as possible solutions. For
simultaneous estimation of the matrices X and Y , the approach from [
21
] was
extended to quaternion algebra [
29
] by Zhuang et al. [
30
]. It is also possible to
combine hand-eye-calibration with the calibration of the robot's kinematic
parameters and the camera's intrinsic parameters [
32
]. However, this results in a
very large nonlinear optimization problem. More recently, a method was presented
to use a structure-from-motion approach to solve the calibration problem [
1
].
In summary, different solutions and approaches for hand-eye calibration exist
and the method by Tsai and Lenz has emerged as the most popular solution.
Nevertheless, all those methods have one thing in common: They expect that
Search WWH ::

Custom Search