Biomedical Engineering Reference
In-Depth Information
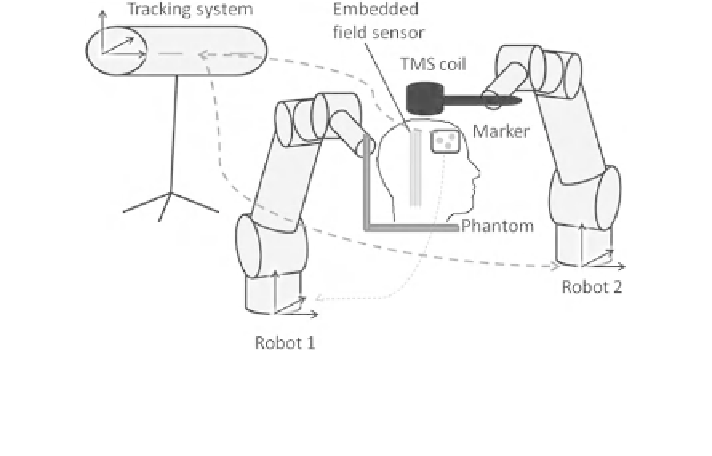
Fig. 2.3 Schematic setup of motion replay. We use one robot with a field sensor, embedded in a
head phantom, to replay the recorded head motion. A tracking system is calibrated to a second
robot and tracks a marker attached to the head phantom. The second robot carries the TMS coil
and compensates for head motion
of a marker attached to the subject's head. Therefore, we must compensate for the
center of rotation. By directly replaying the recorded motion, the center of rotation
would be in the robot's end effector which would result in enlarged movements.
To overcome that, we move the head phantom relative to a given starting
position. Consequently, we transfer the center of rotation from robot end effector
to the marker, apply the relative rotation and transfer the center of rotation back to
move the robot.
2.2 Realization and Data Acquisition
2.2.1 Head Motion Measurements
First, we record head motion for three different typical TMS scenarios:
(a) restrain: avoiding head motion,
(b) rest: using a head rest, and
(c) freely: moving the head freely.
For restrain the subject sits on a treatment chair and is asked to avoid head motion
during recording. A coil holder (Magic Arm; Lino Manfrotto + Co. Spa, Bassano
del Grappa, Italy) retains the coil after the positioning on the head. An additional
head resting frame helps the subject to maintain its head pose in rest.Forfreely the
coil is mounted to a robot (Viper s850; Adept Technology, Inc., Pleasanton, CA,
USA) and motion is actively compensated by respective coil motion [
15
]. For this
Search WWH ::

Custom Search