Biomedical Engineering Reference
In-Depth Information
infrared tracking system (Northern Digital, Inc., Waterloo, Ontario, Canada). The
treatment chair is placed in front of the robot, facing the tracking system. The TMS
coil is mounted to the robot's end effector and connected to a TMS stimulator. A
computer runs the TMS GUI and controls robot and tracking system.
Robot and tracking system are communicating with an individual server pro-
gram which allows for maximal flexibility [
45
]. The robot server, for instance,
provides a well-defined coordinate system and unique joint rotations [
62
]. In this
way, the hardware can be substituted without changing the control program. Both
server programs are communicating with the TMS control program via TCP/IP.
This communication setup is schematically illustrated in Fig.
1.8
.
1.3.2.2 Typical Procedure of Robotized TMS
As tracking system and robot have a unique coordinate frame, a calibration
between robot and tracking system must be performed before system start. This is
typically done by measuring a set of robot positions with a marker attached to the
robot's end effector.
Section 4.1
describes this calibration problem in more detail.
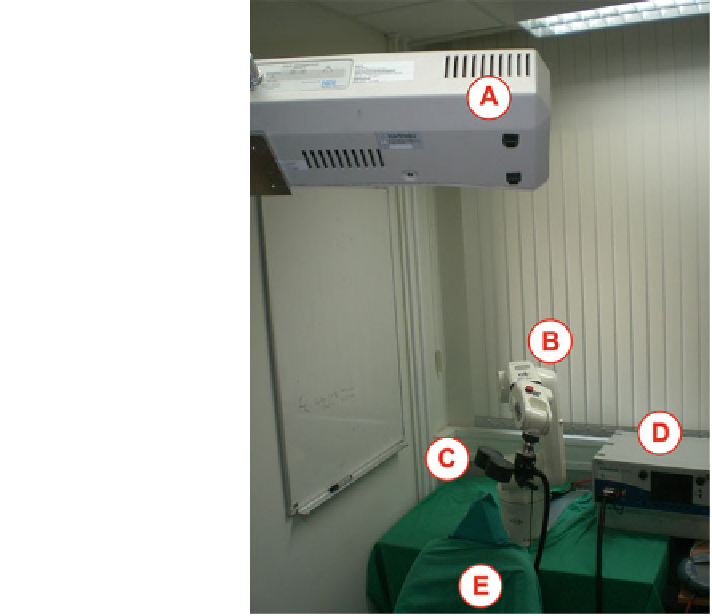
Fig. 1.7 The robotized TMS
system consists of a Polaris
stereo-optic infrared tracking
system (A) placed opposite to
an Adept Viper s850
industrial robot (B). Both
systems are connected to a
control computer. The TMS
coil (C) is mounted to the
robot's end effector and
connected to a stimulator (D).
The treatment chair (E)is
placed in front of the robot
directed towards the tracking
camera
Search WWH ::

Custom Search