Biomedical Engineering Reference
In-Depth Information
(a)
(b)
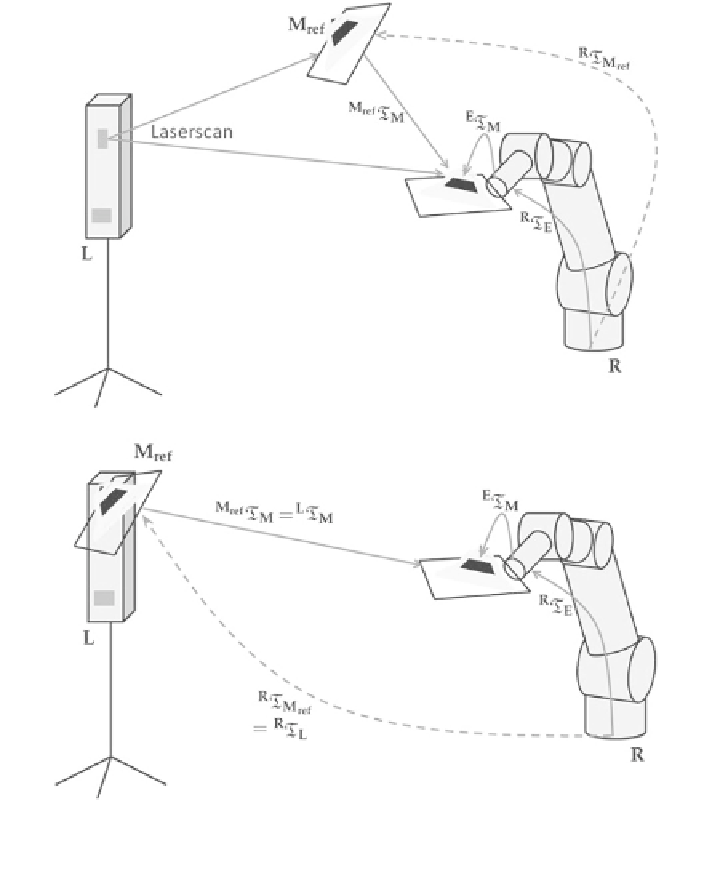
Fig. 8.3 Calibration of laser scanner to robot. a Instead of a direct calibration, a reference image
of the calibration phantom is used for calibration. b When we shift the reference image into the
origin of the laser scanner coordinate frame, we can compute the required transform
R
T
L
For coil registration, the transformation
E
T
C
from the robot's end effector E to
the coil C is estimated. We must therefore use the calculated transformation from
robot to laser scanner
R
T
L
to register the coil. Again, we use the reference image
of the coil C
ref
virtually placed into the origin of the laser scanner to compute the
coil registration matrix:
E
T
C
¼
E
T
R
R
T
L
L
T
C
ref
C
ref
T
C
:
ð
8
:
2
Þ
Search WWH ::

Custom Search