Biomedical Engineering Reference
In-Depth Information
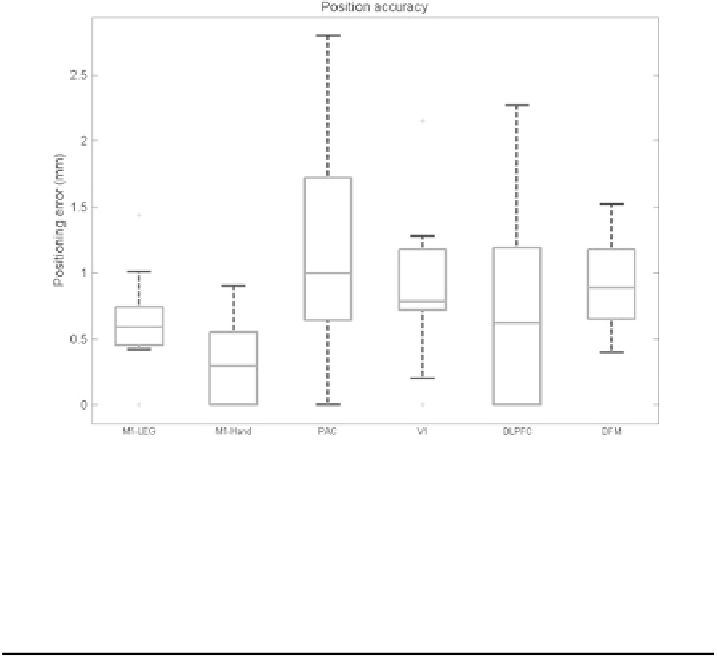
Fig. 7.8 Positioning accuracy for optimized hand-assisted positioning for six targets on a head
phantom as a boxplot. From left to right the results for M1-LEG, M1-HAND, PAC, V1, DLPFC
and GFM are shown. Positioning results of ten inexperienced operators were evaluated. The
errors are listed in Table
7.2
Table 7.2 Positioning accuracy for optimized hand-assisted positioning for each single targets
on the head phantom
M1-LEG M1-HAND PAC V1 DLPFC GFM
Mean (mm) 0.64 0.34 1.16 0.90 0.80 0.93
SD (mm) 0.38 0.35 0.79 0.60 0.78 0.38
Max (mm) 1.44 0.90 2.80 2.15 2.27 1.52
The average error (mean), the standard deviation (SD) and the maximum error (max) are listed.
The values are illustrated in Fig.
7.8
7.6 Optimized FT-Control for Clinical Acceptance
We have demonstrated that the FT-control can be essentially optimized with the
FTA sensor. By implementing the hand-assisted positioning method directly on the
robot controller the latency is minimized. In this way, the optimized FT-control
allows inexperienced operators to use the robotized system for coil placement in
an intuitive fashion without a complex training phase. The users are now able to
position the coil precisely at the stimulation target. In this way, the FTA sensor
with optimized FT-control dramatically increases the system's usability and
therefore its clinical acceptance as it can be integrated directly into the clinical
workflow.

Search WWH ::

Custom Search