Biomedical Engineering Reference
In-Depth Information
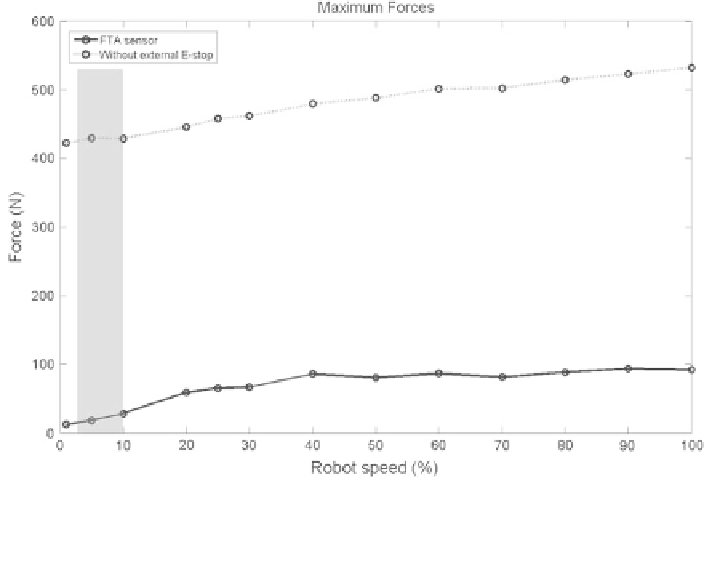
Fig. 6.15 The maximum measured forces in relation to the robot speed. Using the FTA sensor is
displayed as a solid line, using no external emergency stop is shown as a dotted line. The gray
area represents the typical speed for robotized TMS (3-10 %)
References
1. Richter, L., Bruder, R., Schweikard, A.: Calibration of force/torque and acceleration for an
independent safety layer in medical robotic systems. Cureus 4(9), e59 (2012). doi:
10.7759/
2. Richter, L., Bruder, R.: Design, implementation and evaluation of an independent real-time
safety layer for medical robotic systems using fta sensor. Int. J. Comput. Assist. Radiol. Surg.
(2012), (Epub ahead of print ). doi:
10.1007/s11548-012-0791-5
3. Matthäus, L.: A robotic assistance system for transcranial magnetic stimulation and its
application to motor cortex mapping. Ph.D. thesis, Universität zu Lübeck (2008)
4. Matthäus, L., Giese, A., Wertheimer, D., Schweikard, A.: Planning and analyzing robotized
tms using virtual reality. Stud. Health Technol. Inform. 119, 373-378 (2006)
Search WWH ::

Custom Search