Biomedical Engineering Reference
In-Depth Information
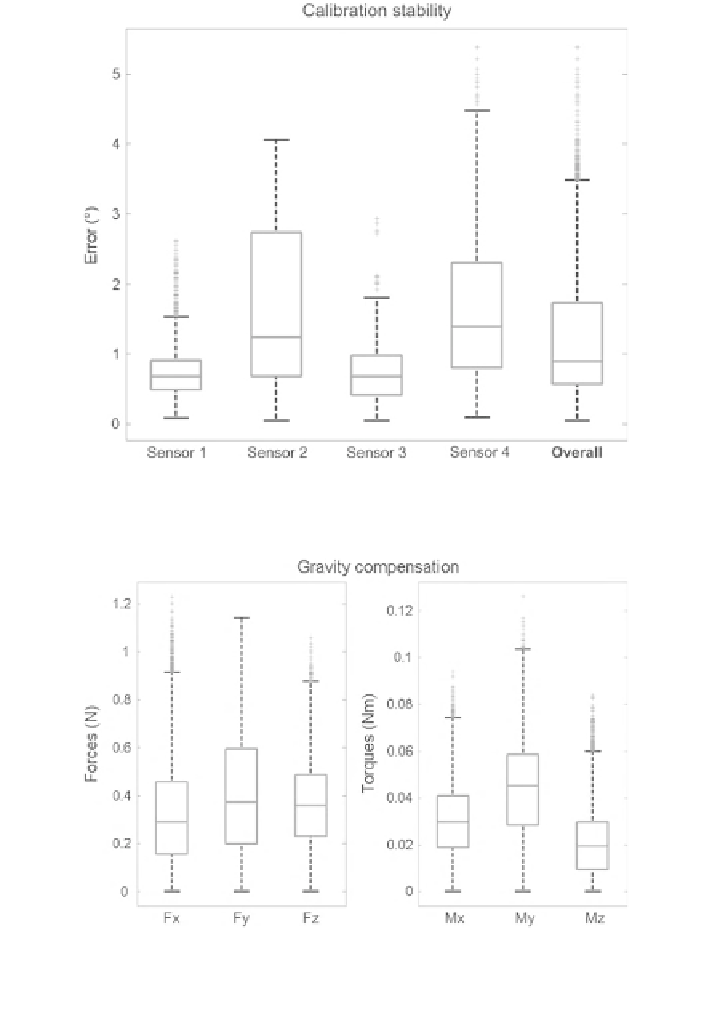
Fig. 6.12 Results of the gravity compensation based on accelerations. The errors for forces (left)
and torques (right) are shown as boxplots
Fig. 6.13 The distance is shown that the robot still moved after the impact until the robot came
to a full stop. Using the FTA sensor is displayed as a solid line, using no external emergency stop
is shown as a dotted line. The gray area represents the typical speed for robotized TMS (3-10 %)
Figure
6.12
shows the error of the gravity compensated forces and torques. On
average, the error for forces is in the range of 0.3-0.4 N for each spatial axis. For
torques, the average error was in the range of 0.02-0.045 Nm. Note that the used
weight corresponded to approximately 0.7 kg. Hence, the error for forces is
Search WWH ::

Custom Search