Biomedical Engineering Reference
In-Depth Information
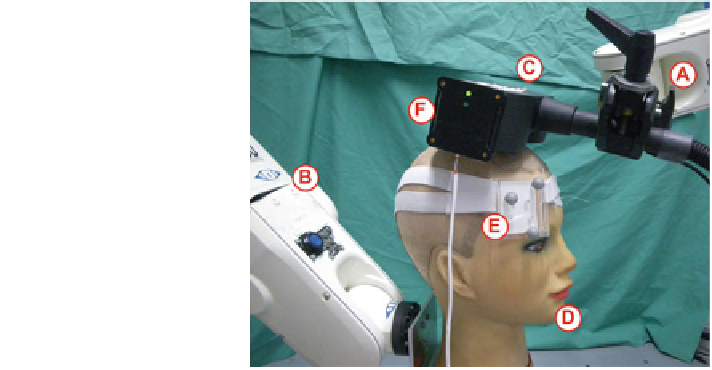
Fig. 5.5 Setup for latency
measurement of the contact
pressure control. The first
robot (A) holds the TMS coil
(C) and a second robot
(B) carries a head phantom
(D). A tracking device tracks
the coil via an active marker
(F) and a passive marker
(E) at the head phantom. The
first robot compensates
movements by the second
robot using the contact
pressure control
Thus, we mount a head phantom to a second Adept robot. The second robot is
located next to the first robot equipped with the force-torque sensor. We position
the TMS coil on top of the head phantom with the first robot and start the contact
pressure control. Figure.
5.5
illustrates this evaluation setup. Now, we move the
head phantom with the second robot and the contact pressure control compensates
for that motion. We record the movements using the Polaris tracking system. We
attach an active marker to the coil and a headband with passive marker spheres to
the head phantom. We estimate the latency of the pressure control by comparing
start of recorded head phantom movement and start of coil movement. Addi-
tionally, the control frequency is measured in parallel.
5.3 Results of FT-Control
5.3.1 Coil Calibration and Gravity Compensation
We have tested eight different TMS coils for the coil calibration and gravity
compensation method. After calibration, we have moved the coils to different
positions with changing spatial orientations. At each position, we have computed
the user applied forces and torques at rest. As quantitative error measure, we have
compared these values to zero.
The mean error over all eight coils used is 1.89 N and 0.31 Nm for absolute
forces and torques, respectively. The maximum errors are 3.53 N and 1.08 Nm,
respectively. The results in detail for each coil are summarized in Table
5.2
for
forces and torques.
Note that these errors refer to the absolute errors in forces and torques.
For contact pressure control (cf.
Sect. 5.2.3
), however, only the z-directed force
Search WWH ::

Custom Search