Biomedical Engineering Reference
In-Depth Information
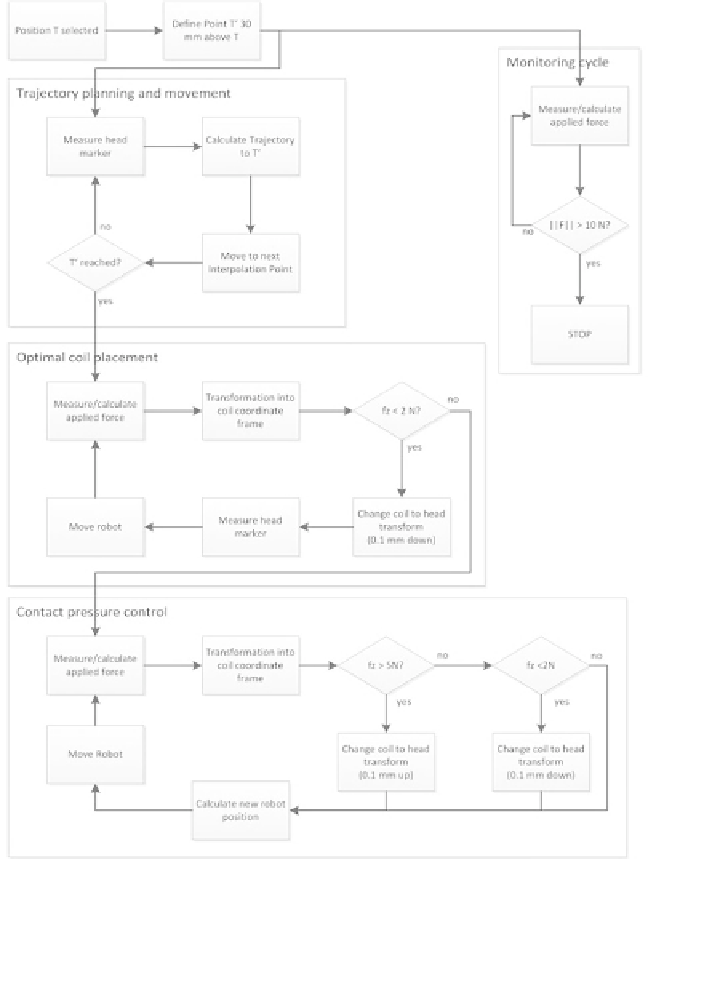
Fig. 5.4 The process of contact pressure control as a control diagram. First, a point above the
target is selected and the robot moves the coil to this position. Afterwards, the coil is moved down
until it touches the head for an optimal coil placement. Subsequently, the contact pressure control
starts to maintain the optimal coil placement. The FT measurements are continuously monitored
and, in case of too large values, the robot and the control loop are stopped. Note that the coil and
head movement controls are not shown
is reached, motion compensation automatically starts. To bring the coil on the head
with an optimal head-to-coil distance, the coil to head distance is subsequently
decreased by 0.1 mm until a z-directed force larger than 2 N is measured while the
Search WWH ::

Custom Search